로봇
로봇을보정한후에는일반적으로프로그램을필터링하기위해 RoboDK가필요하므로 RoboDK 라이선스가필요합니다(로봇을보정한후정확한로봇프로그램을생성하려면기본 OLP 라이선스로충분합니다). 프로그램필터링은모든교정매개변수(약30개의매개변수)를고려하여로봇의정확도를향상하기위해프로그램의대상이변경/최적화됨을의미합니다.
또는조인트오프셋과기본및툴기준좌표계(4개의조인트오프셋파라미터와기본좌표계의경우6개의파라미터, 툴좌표계의경우6개의파라미터) 만보정할수있습니다. 보정은기본전체보정을사용하는것처럼정확하지않지만로봇컨트롤러에특정매개변수를입력할수있으며로봇프로그램을생성하기위해 RoboDK에의존하지않을수있습니다.
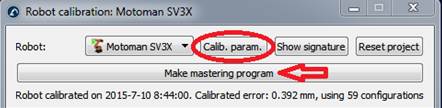
조인트오프셋에대해서만교정을얻으려면보정 매개변수버튼을클릭한다음로봇보정메뉴내부마스터링버튼을클릭하십시오.

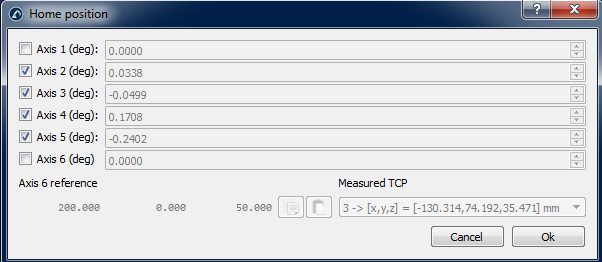
마스터링프로그램만들기를선택하면새로운창이나타납니다. 이창에서새로운원점위치생성을고려할축을선택할수있습니다.
로봇보정창에마스터링 프로그램 만들기버튼이나타납니다. 로봇을새로운원위치로가져오는프로그램을생성하려면이버튼을선택하십시오. 로봇으로옮기고실행하면새로운원점위치를기록해야합니다.
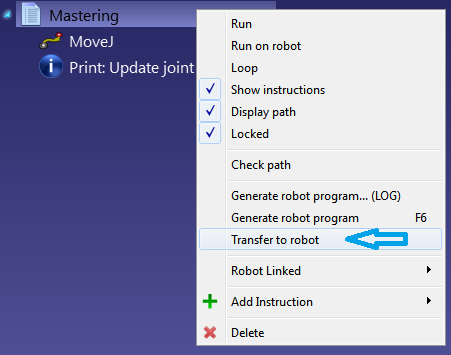
로봇과 PC가연결되어있으면프로그램을마우스오른쪽버튼으로클릭하고로봇에 프로그램 보내기를선택하여프로그램을로봇에자동으로보낼수있습니다. 그렇지않으면, 로봇 프로그램 생성을선택하여홈위치에대한새로운조인트값을볼수있습니다.
예를들어, 다음단계에따라 Motoman 로봇의홈위치를업데이트해야합니다.
먼저로봇을새로운원위치로가져오려면“마스터링”프로그램을실행해야합니다.
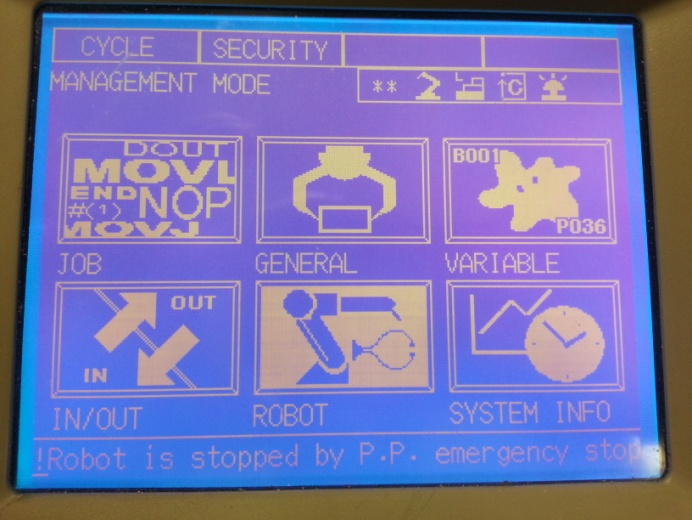
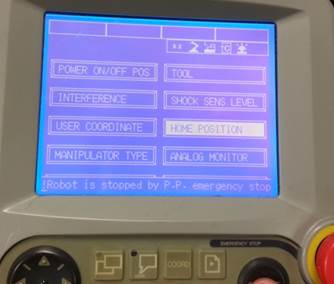
프로그램이컨트롤러에들어가면“관리모드”(Motoman 로봇의비밀번호는보통 99999999)로로그인해야하며티치모드에있어야합니다. 다음이미지는수행하여야할단계를보여줍니다.
.


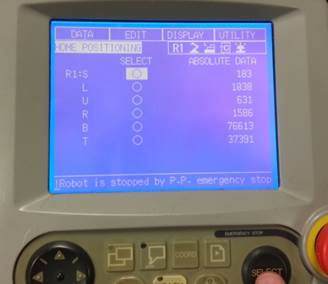

모든로봇조인트의홈위치를업데이트하십시오.
원위치가설정되면로봇을새로운원위치로가져온로봇프로그램을삭제해야합니다.