축
축 1을실제로봇기본좌표계에정렬하려면로봇보정을시작하기전에3개의기본타겟을올바르게측정해야합니다. 로봇과관련하여기준좌표계를찾을수있도록이러한기본타겟을선택해야합니다.
축 1의 "홈" 위치는로봇기준설정뿐만아니라3개의기준타겟에직접의존합니다. 로봇기준설정은첫번째보정단계이며, 축 1과 2를이동및측정하여측정시스템의기준좌표계가로봇기본좌표계에대해배치됩니다.
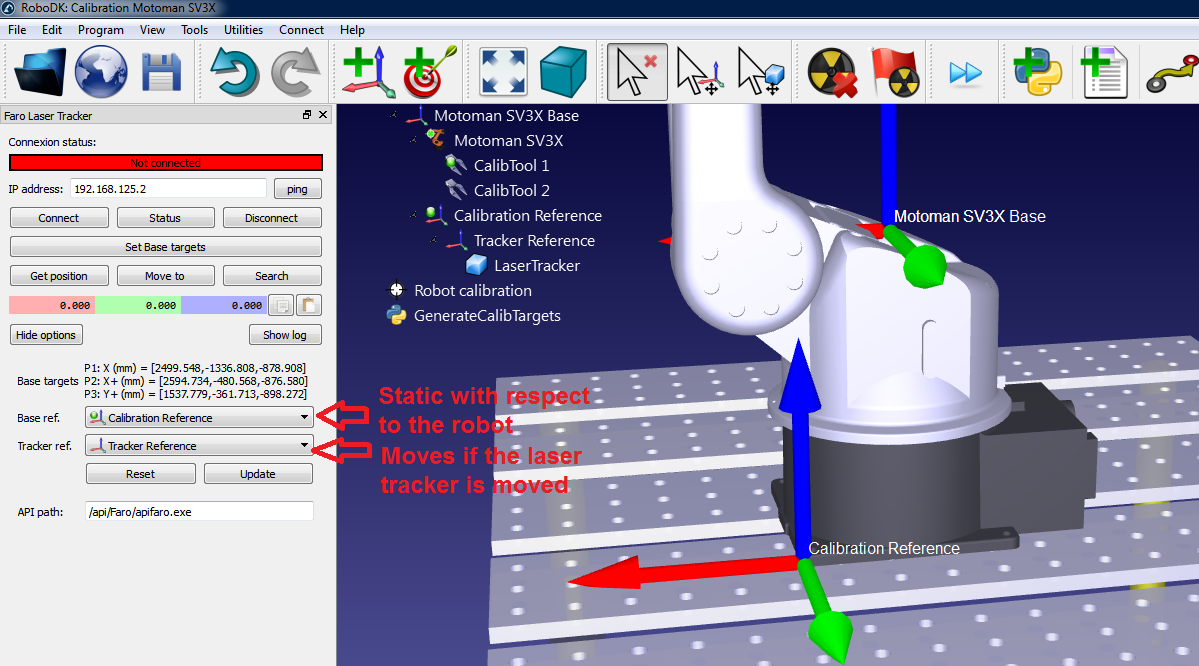
"기본타겟설정"을누르면측정시스템의기본타겟을설정할수있습니다(다음이미지참조). 원하는로봇기준좌표계를정의하는3개의측정입니다 (처음2개의측정은 X 축을정의하고세번째점은양의 Y 축을정의합니다). 이과정을반복할수있도록로봇기본과관련된적절한기준점을사용해야합니다.
조인트 1의보정각도는3점을통해측정된기본기준의 X 축과로봇축 1 및 2를움직여측정한기본기준사이의각도입니다. 물론두벡터모두사전에트리포인트를터치하여얻은기본기준의 XY 평면에투영됩니다.