부록
축 1과 6의마스터링/홈값을복구하려면특별한주의를기울여야합니다. 이값은축 1의로봇기본좌표계및축 6의 TCP 참조와직접관련이있습니다. 따라서외부측정을수행해야합니다. 이값을올바르게설정하십시오. 이메뉴는보정메뉴에서 "마스터링프로그램만들기"를선택하면나타납니다.
이두축의마스터링매개변수를올바르게설정하려면다음의두절차를따라야합니다.
축 6 기준
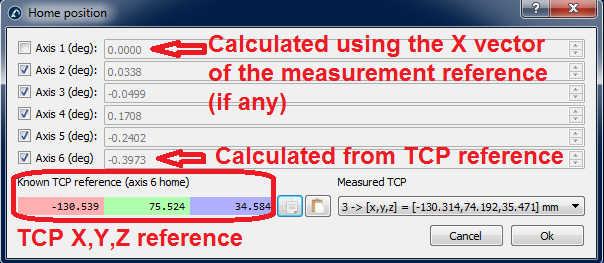
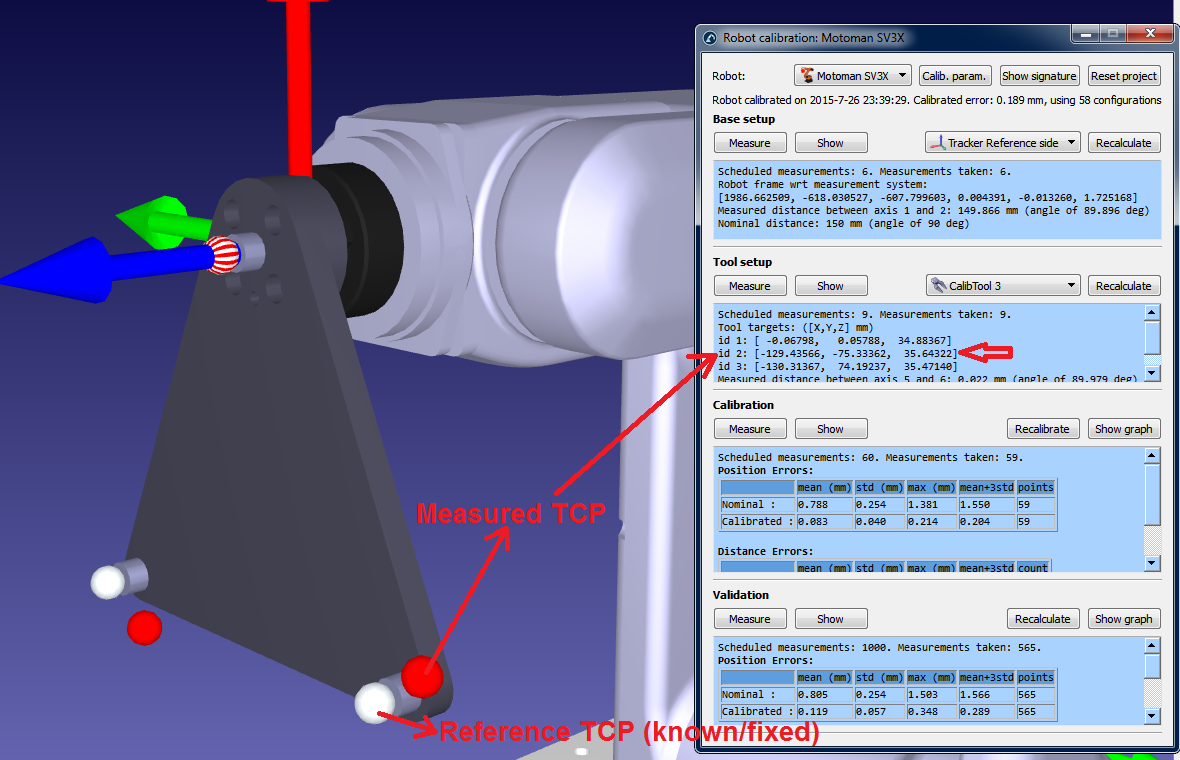
축 6의 "홈"위치를올바르게설정하려면기준대상을사용해야합니다. 각도오프셋은측정된 TCP(X, Y, Z)를알려진 TCP에가장잘맞추는데필요한툴플랜지의 Z 축을중심으로한회전입니다. TCP 기준측정된 TCP(다음이미지참조)는보정절차의2단계에서측정된 TCP 중하나입니다. 기준 TCP는사용중인교정도구의 TCP 중하나에해당하는지알려진기준입니다.
이상적으로는툴플랜지와관련하여 CMM에서기준 TCP를측정해야합니다(로봇툴플랜지의복제본이가장적합함). 또는새로운로봇을사용하여처음으로 TCP를측정(2단계교정)하고측정된 TCP를기준으로사용할수있습니다. 엔드이펙터가항상같은위치에놓이도록다웰핀및/또는적절한툴플랜지기준을사용하는것이중요합니다.
축1 기준
축 1을실제로봇기본좌표계에정렬하려면로봇보정을시작하기전에3개의기본타겟을올바르게측정해야합니다. 로봇과관련하여기준좌표계를찾을수있도록이러한기본타겟을선택해야합니다.
축 1의 "홈" 위치는로봇기준설정뿐만아니라3개의기준타겟에직접의존합니다. 로봇기준설정은첫번째보정단계이며, 축 1과 2를이동및측정하여측정시스템의기준좌표계가로봇기본좌표계에대해배치됩니다.
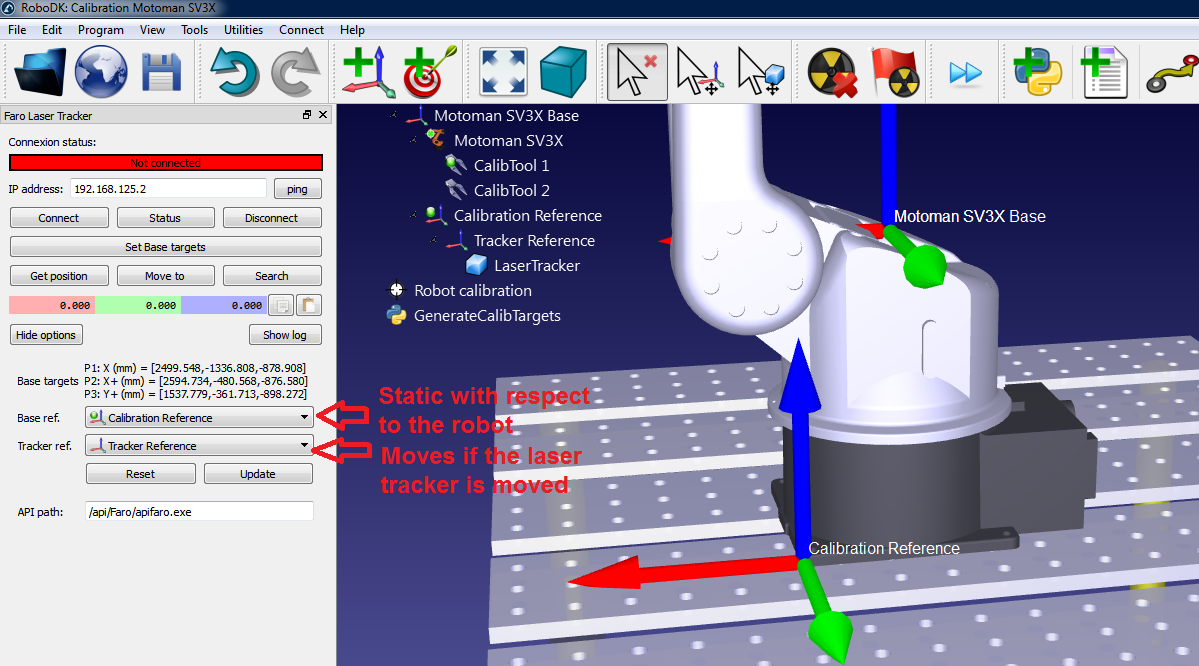
"기본타겟설정"을누르면측정시스템의기본타겟을설정할수있습니다(다음이미지참조). 원하는로봇기준좌표계를정의하는3개의측정입니다 (처음2개의측정은 X 축을정의하고세번째점은양의 Y 축을정의합니다). 이과정을반복할수있도록로봇기본과관련된적절한기준점을사용해야합니다.
조인트 1의보정각도는3점을통해측정된기본기준의 X 축과로봇축 1 및 2를움직여측정한기본기준사이의각도입니다. 물론두벡터모두사전에트리포인트를터치하여얻은기본기준의 XY 평면에투영됩니다.