기준
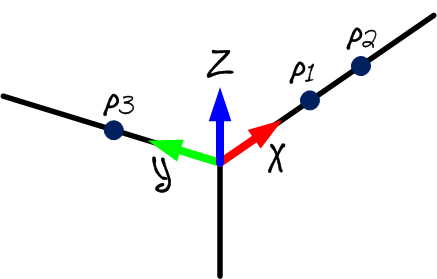
로봇기준에부착된보정기준좌표계를측정하는것이좋습니다. 보정중에트래커를움직이거나두개의보정을비교할때도움이됩니다. 보정기준좌표계는 3개의유형지점으로정의해야합니다.
로봇과관련하여트래커를이동하지않거나축 1의원점을복구할필요가없는경우, 이단계를건너뛸수있습니다. 이경우레이저트래커의기준이사용됩니다.
중요: 이단계는축 1의원점위치를복구하려는경우중요합니다. 자세한내용은부록 III을참조하십시오.
레이저트래커를움직일때마다다음단계를수행하십시오.
1.연결➔레이저 트래커 연결을선택하십시오.
2.레이저트래커가연결되지않은경우레이저트래커의 IP를설정하고연결을선택하십시오.
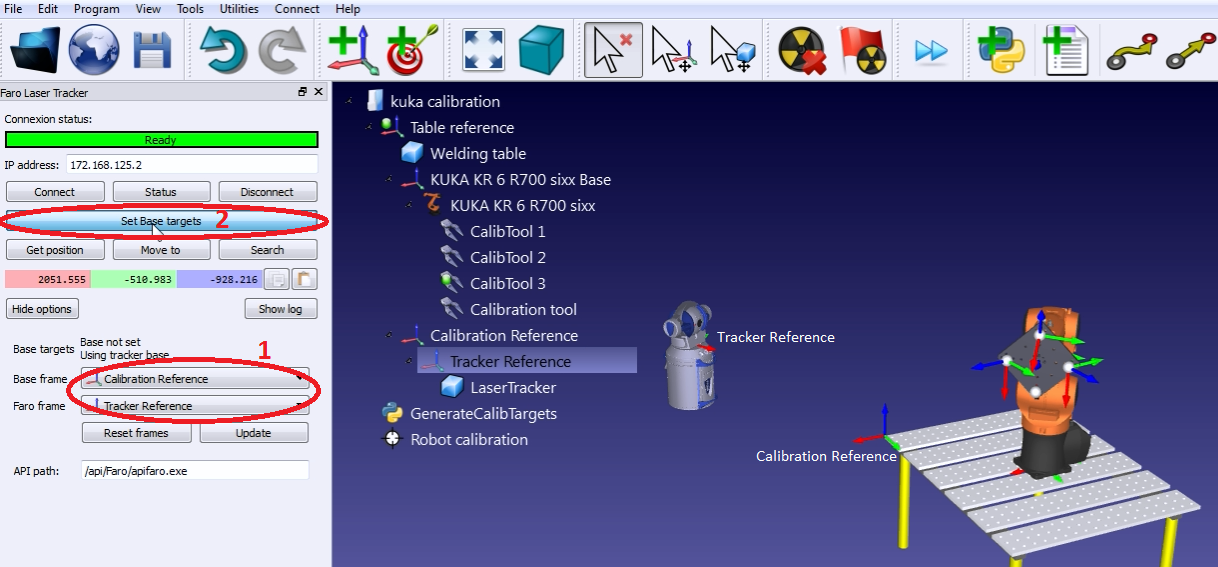
3.이미지에표시된대로보정기준및트래커기준을설정하십시오. 보정기준은 "측정기준"이라고도합니다.
4.기본타겟설정을선택하십시오.
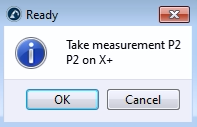
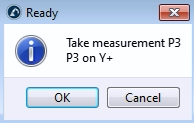
RoboDK는다음이미지에표시된메뉴를사용자에게안내합니다. 절차가완료되면레이저트래커의위치가보정기준과관련하여자동으로업데이트됩니다.