로봇
측정절차를자동화하려면레이저트래커와로봇을컴퓨터에연결해야합니다. 레이저트래커를움직일경우 3점을통해기준좌표계를측정하는것이좋습니다 (이단계는축 1의원점위치를복구하려는경우필수입니다. 자세한내용은부록 II참조).
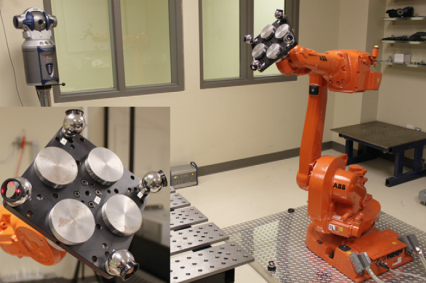
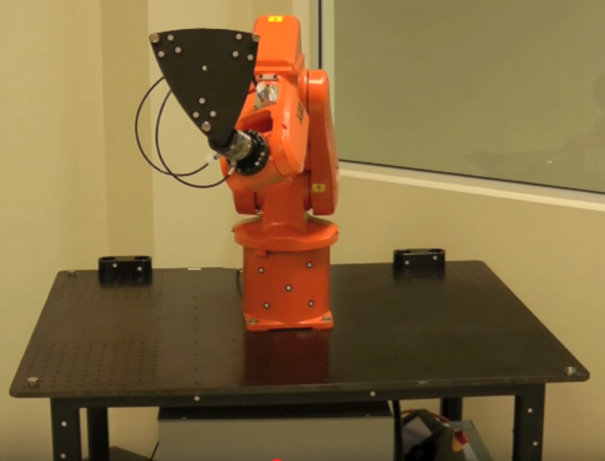
다음이미지에표시된대로하나이상의 SMR 대상을부착해야합니다(3 개이상권장). 레이저트래커를이동해야하는경우 3개의네스트를기준좌표계로사용하는것이편리합니다.
측정준비를위해서는아래의섹션을차례로수행해야합니다.
트래커 연결
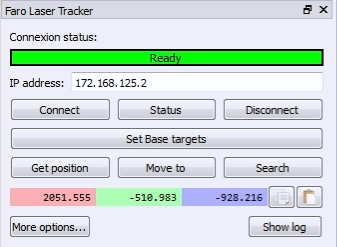
RoboDK와의통신을올바르게설정하려면레이저트래커의 IP가필요합니다. 레이저트래커와의통신을확인하려면다음단계를수행하십시오.
a.연결➔레이저트래커연결메뉴를선택하십시오. 새로운창이열릴것입니다.
b.레이저트래커의 IP를설정하십시오.
c.“연결”버튼을클릭하십시오.
연결에성공하면“준비”라는녹색메시지가표시됩니다. 창을닫을수있으며연결은활성상태로유지됩니다.
로봇 연결
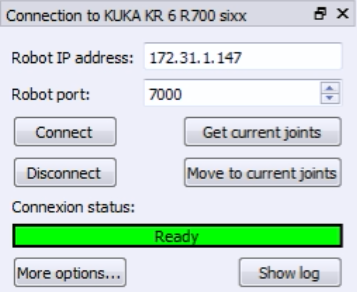
RoboDK와의통신을올바르게설정하려면로봇의 IP(또는 RS232 연결을위한 COM 포트번호)가필요합니다. 로봇과의통신을확인하려면다음단계를따르십시오.
1.연결➔로봇 연결을선택하십시오. 새로운창이열릴것입니다.
2.로봇의 IP 및포트(또는 RS232를통한연결의경우 COM 포트)를설정하십시오.
3.연결버튼을클릭하십시오.
4.문제가발생하면부록을참조하십시오.
연결에성공하면준비완료를표시하는녹색메시지가표시됩니다. 위치 가져오기를선택하면가상로봇의위치가실제로봇의위치와정확히일치해야합니다. 또는로봇을시뮬레이터에설정된현재위치로이동하려면현재 조인트로 이동을선택하십시오. 창을닫을수있으며창이닫히더라도연결은활성상태로유지됩니다.
기준 타겟 측정
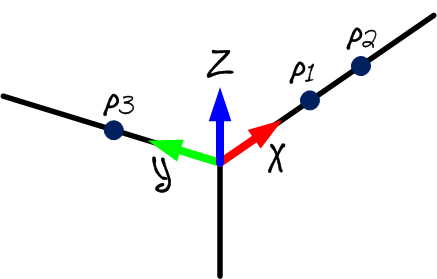
로봇기준에부착된보정기준좌표계를측정하는것이좋습니다. 보정중에트래커를움직이거나두개의보정을비교할때도움이됩니다. 보정기준좌표계는 3개의유형지점으로정의해야합니다.
로봇과관련하여트래커를이동하지않거나축 1의원점을복구할필요가없는경우, 이단계를건너뛸수있습니다. 이경우레이저트래커의기준이사용됩니다.
레이저트래커를움직일때마다다음단계를수행하십시오.
1.연결➔레이저 트래커 연결을선택하십시오.
2.레이저트래커가연결되지않은경우레이저트래커의 IP를설정하고연결을선택하십시오.
3.이미지에표시된대로보정기준및트래커기준을설정하십시오. 보정기준은 "측정기준"이라고도합니다.
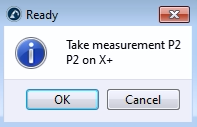
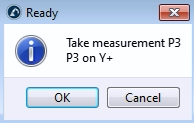
4.기본타겟설정을선택하십시오.
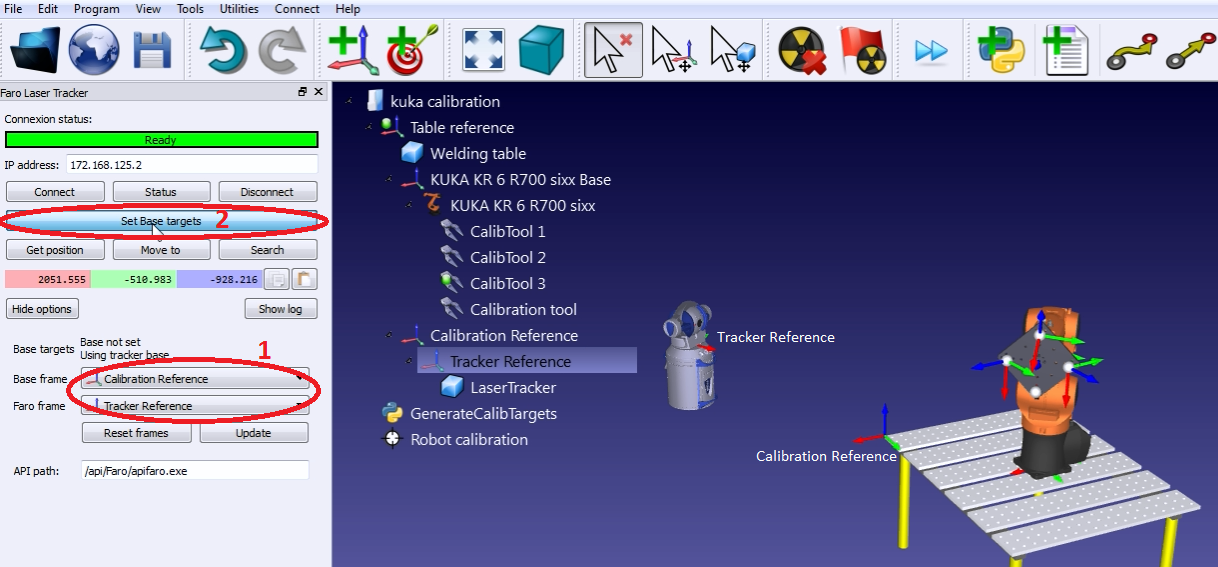
RoboDK는다음이미지에표시된메뉴를사용자에게안내합니다. 절차가완료되면레이저트래커의위치가보정기준과관련하여자동으로업데이트됩니다.