툴
6개의측정에대해동일한목표를측정하는한툴플랜지의어느곳에서나측정 1-6을수행할수있습니다. 그후에측정하려는모든 TCP는동일한 TCP에대해하나의측정을추가합니다. 이경우에는 3개의 TCP가있으므로총 6 + 3 = 9 측정이됩니다. 측정을두번클릭하면해당위치에서측정을계속할수있습니다.
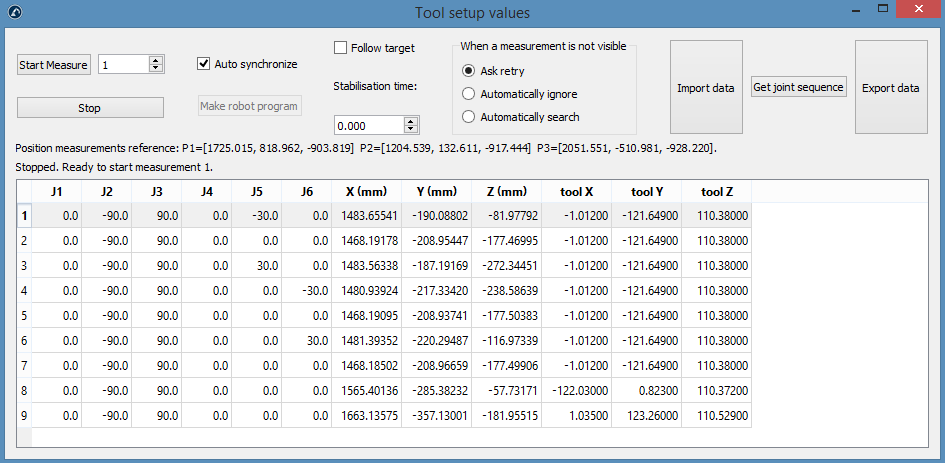
이전섹션과같이툴 설정섹션에서측정을선택하십시오. 다음과같은창이열립니다. 측정 시작을선택하면로봇이계획된측정을통해차례로수행합니다. 해당위치에서측정을계속하려면측정을두번클릭하십시오.
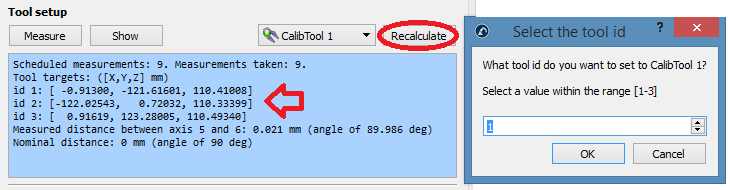
절차가완료되면요약에보정된 TCP가표시됩니다. TCP 정의(다음이미지“CalibTool 1”)는자동으로업데이트됩니다. TCP를선택하지않은경우새 TCP를추가하고(“프로그램➔새툴추가”선택) “재계산”을선택할수있습니다. 새로운창이나타나고측정순서에따라툴의 "id"를선택해야합니다. 동일한절차를반복하여필요한만큼많은 TCP(이경우에는 3 개의 TCP)를업데이트할수있습니다. 툴이름이숫자로끝나면도구의 ID가자동으로감지됩니다.