부록
로봇보정은측정시스템이있는로봇에서측정해야합니다. 이러한측정을수행하려면컴퓨터와통신하는 Faro 레이저트래커가필요합니다. 통신은콘솔모드에서실행할수있는 driver exe 파일을통해수행됩니다.
예를들어 Faro는 "Tracker Utilities"라는무료응용프로그램을제공합니다. 이응용프로그램은무엇보다도레이저트래커를초기화하고상태점검을수행할수있습니다.
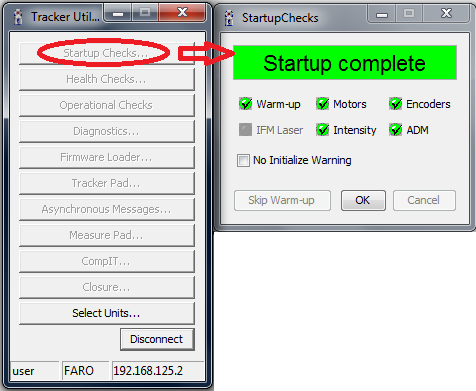
트래커를초기화하려면 "Tracker Utilities" 응용프로그램을시작하고트래커 IP를사용하여연결한다음 "Startup Checks"를선택해야합니다. 추적기가초기화되면초기화하기전에 1.5 'SMR 대상을'홈 '위치에배치해야합니다. 그렇지않으면초기화후녹색표시등이깜박이고측정값이유효하지않습니다.
초기화가완료되면다음이미지와같이 "Startup complete" 메시지를볼수있습니다.

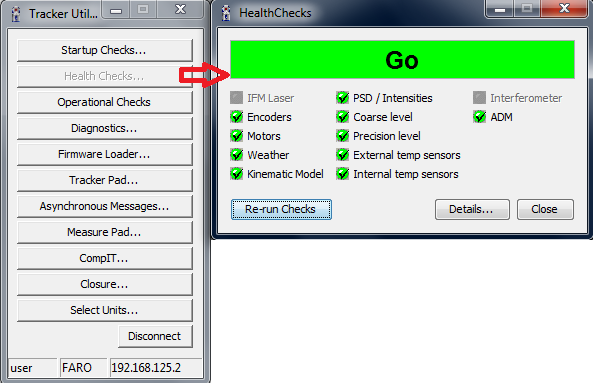
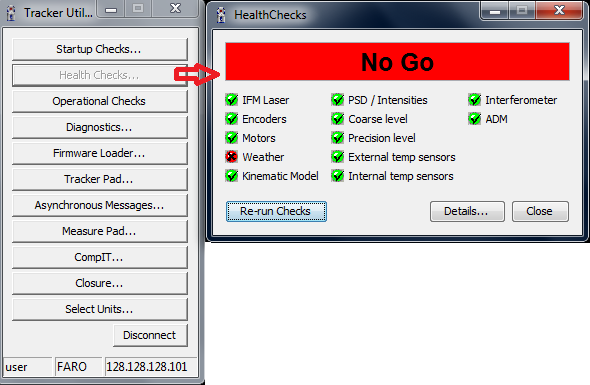
추적기에문제가발생하면“Health Checks…”를눌러상태를검사할수있습니다. 다음두이미지는각각성공확인과실패확인을보여줍니다. 때로는케이블을다시연결하고레이저트래커를재부팅하면문제가해결됩니다.
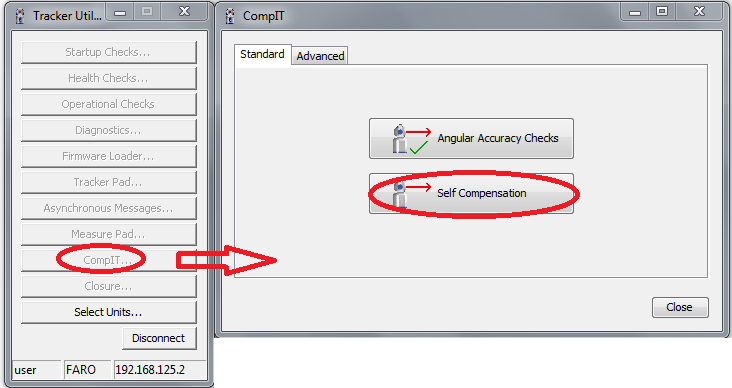
참고:수시로트래커자체 보정을수행하는것이좋습니다. 이보정은트래커헤드의일부기준점을사용하여측정시스템을자동보정합니다. 또는레이저트래커의정확도를검증하기위해각도정확도검사를실행할수있습니다.
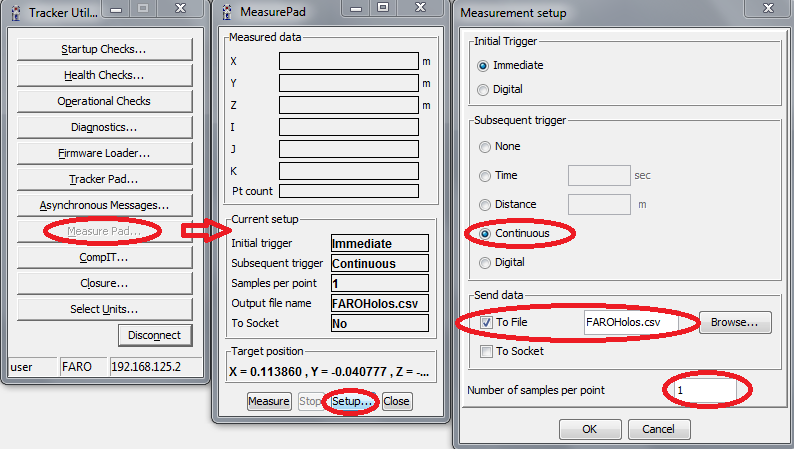
마지막으로“측정패드”를사용하여측정할수있습니다. 레이저트래커는목표물을따라 1000Hz의속도로 XYZ 위치를측정할수있습니다. 포인트당하나의샘플과연속트리거를설정하면트래커는초당1000개의측정값을 CSV 파일로기록합니다.
이기능을사용하여로봇경로를측정하고 RoboDK의경로정확도검사를사용하여경로를따라정확도, 속도및가속도를확인할수있습니다.