문제
로봇드라이버설정은오프라인에서프로그램을생성하는것(오프라인프로그래밍)만큼간단하지않을수있습니다. 연결이작동하지않으면다음단계는문제의원인을찾는몇가지팁을제공합니다:
1.로봇의 IP가올바르고도달가능한지확인하십시오. 로봇연결메뉴에서ping 버튼을선택하여 (또는 명령줄에서 로봇에 대해 ping을 실행) 로봇과컴퓨터가같은네트워크에있는지확인하십시오.
2.로봇과컴퓨터가같은네트워크에있지않으면컴퓨터의고정 IP를설정하십시오.
3.Windows를사용하는경우: 연결을차단하지않으려면 Windows 방화벽이꺼져있는지확인하십시오.
4.로봇쪽에서통신포트가적절하고사용가능한지확인하십시오.
5.컨트롤러모델에따라로봇컨트롤러에서적절한지침을따르십시오.
6.로봇연결창에서연결끊기를두번클릭하여드라이버를강제로중지한다음다시연결을선택하여새연결을시도하십시오.
Ping 테스트
Ping 테스트는인터넷프로토콜(IP) 네트워크에서로봇의도달가능성을테스트합니다.
Windows에서Ping 테스트를수행하려면다음단계를수행하십시오:
1.다음을선택하여새콘솔창을열기
2.cmd를입력하고확인을선택
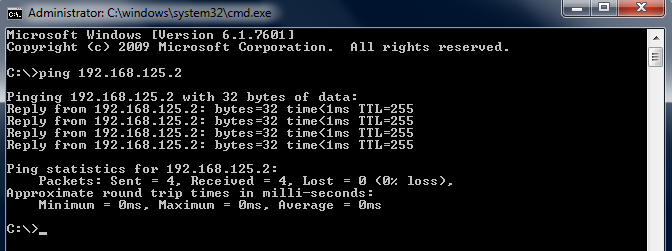
3.ping IP를입력 (여기서 IP는로봇의 IP 여야함). 예:
ping 192.168.125.2
신호손실이 0 % 인이미지와유사한응답을확인할수있어야합니다.
통신이없으면로봇과 PC의 IP가같은근거리통신망(LAN)에있는지확인해야합니다. 통신을허용하기위해 Windows 방화벽을끄거나규칙을추가해야할수도있습니다.
고정 IP 설정
다음단계에따라컴퓨터의 IP를변경하십시오:
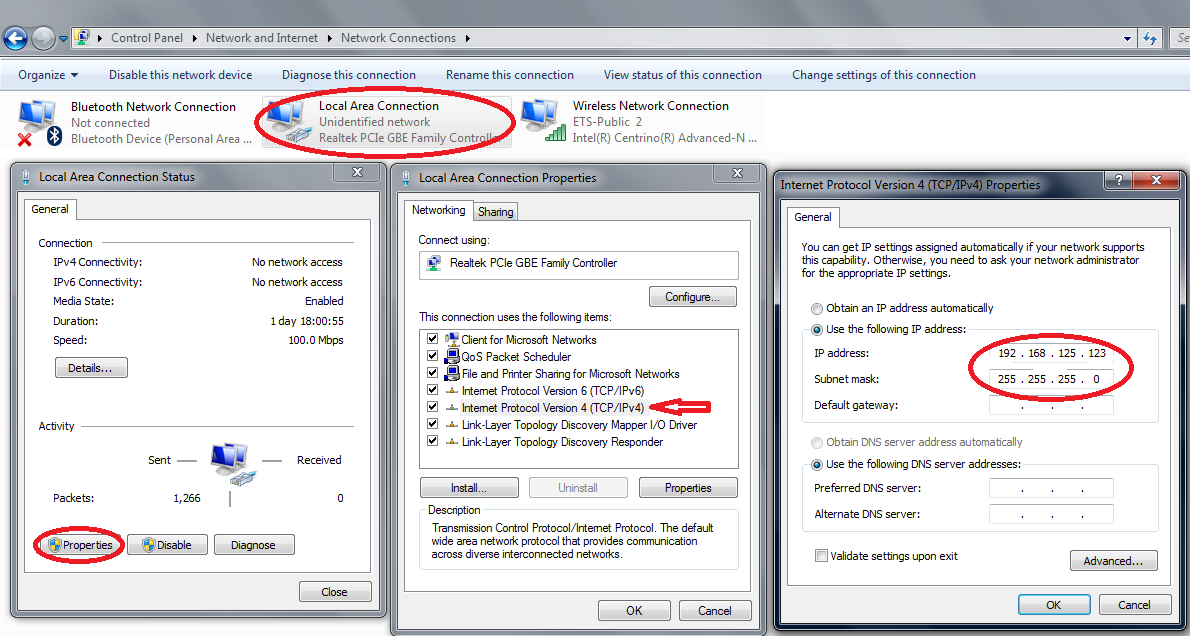
1.Windows 시작➔제어판➔네트워크및인터넷➔네트워크연결을선택
2.로컬영역연결카드를두번클릭
3.속성을선택
4.인터넷프로토콜버전 4(TCP/IPv4)를선택
5.속성을선택
6.로봇 IP 및서브넷마스크에맞춰컴퓨터의 IP를입력