로봇
RoboDK에서로봇드라이버를사용하려면다음단계를따르십시오:
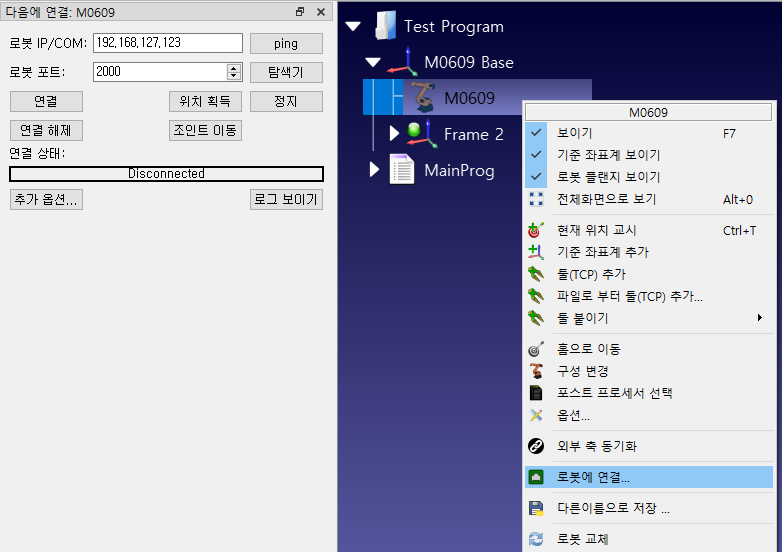
1.로봇을마우스오른쪽버튼으로클릭
2.
3.로봇의 IP를입력
4.연결을선택
다음이미지와같이연결에성공하면준비를표시하는녹색메시지가나타납니다.
GUI 사용
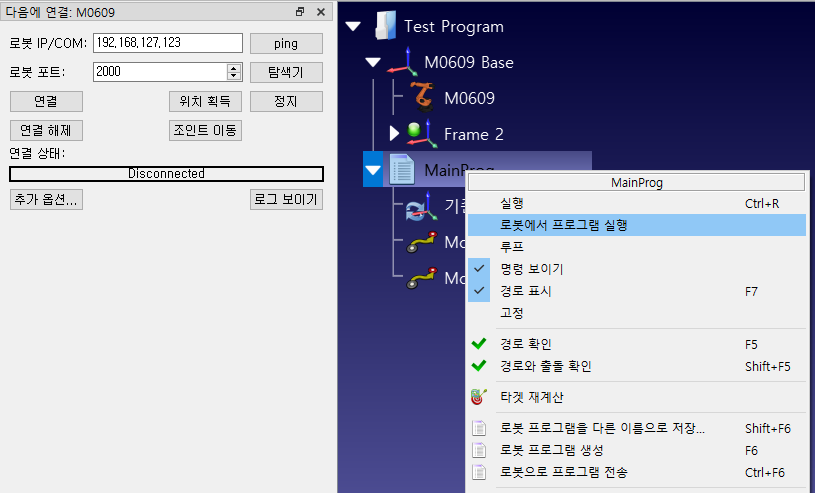
GUI(Graphical User Interface)를사용하여작성된로봇프로그램은다음단계에따라로봇에서실행될수있습니다:
1.
2.로봇에서 실행옵션체크
3.프로그램을두번클릭하여시작
프로그램은실제로봇에서시작해야하며시뮬레이터는로봇의움직임을따릅니다. 로봇이사용중일때연결상태는실행 중…을노란색으로표시합니다.
API 사용
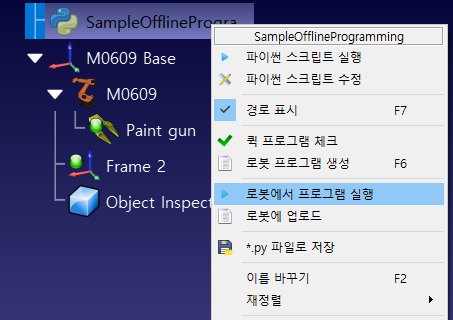
Python 프로그램또는 C # 응용프로그램에서로봇을프로그래밍하기위해RoboDK API를사용해서로봇의이동을제어할수있습니다.
로봇에서실행옵션은 Python 프로그램이 RoboDK에서실행될때자동으로관리됩니다. 로봇에서 Python 프로그램을실행하려면다음단계를따르십시오:
1.
2.
로봇에서프로그램이실행되기시작하고이에따라로봇연결상태가업데이트됩니다.
프로그램이 RoboDK GUI 외부에서실행되는경우(예: 디버깅목적으로또는 C #에 RoboDK API를사용하는경우) RDK.setRunMode를사용하여RunMode를 RUNMODE_RUN_ROBOT로설정할수있습니다. 그러면로봇에서프로그램이실행됩니다. robot.Connect()를사용하여연결을설정할수도있습니다.
다음코드는 API에서직접로봇과연결하는간단한예제를보여줍니다.:
# Start the RoboDK API
RDK = Robolink()
robot = RDK.Item('',ITEM_TYPE_ROBOT)
# Connect to the robot using default connetion parameters
success = robot.Connect()
status, status_msg = robot.ConnectedState()
if status != ROBOTCOM_READY:
# Stop if the connection did not succeed
raise Exception("Failed to connect: " + status_msg)
# Set to run the robot commands on the robot
RDK.setRunMode(RUNMODE_RUN_ROBOT)
# Note: This is set automatically if we use
# robot.Connect() through the API
# Move the robot:
robot.MoveJ([10,20,30,40,50,60])
prog = RDK.Item('MainProgram', ITEM_TYPE_PROGRAM)
prog.setRunType(PROGRAM_RUN_ON_ROBOT) # Set the run on robot option
# Set to PROGRAM_RUN_ON_SIMULATOR to run on the simulator only
prog.RunProgram()
while prog.Busy() == 1:
pause(0.1)
print("Program done")