커브
RoboDK를사용하여 3D 공간에서로봇이커브를따르도록할수있습니다. RoboDK의커브는객체가장자리에서선택하거나 CSV 파일의포인트목록가져오기로확인할수있습니다. 이옵션은예를들어로봇용접애플리케이션에유용합니다.
팁:커브는도구 Z 축과일치하는법선벡터를가질수있습니다(일반적으로표면에법선).
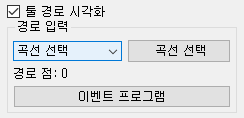
커브추종설정을열기위해유틸리티➔커브 추종 프로젝트를선택하십시오. 이설정은로봇 가공 프로젝트와같지만경로 입력이커브 선택으로사전설정되어있다는점만다릅니다.
커브 선택을선택하여화면에서커브를선택하십시오.
마우스왼쪽클릭으로커브를선택하십시오. 같은커브를두번선택하면동작방향이전환됩니다. 또한, 이전에선택한커브를마우스오른쪽버튼으로클릭하면방향을전환하거나이전에선택한커브를선택취소할수있습니다.
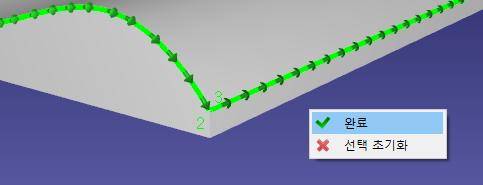
참고: 동작순서는녹색숫자로표시됩니다.
팁:도구➔옵션➔표시를선택하고커브가너무가까이있으면커브선택감도를줄입니다. 또한, 경로를따라작은녹색화살표를표시하도록화살표크기를줄입니다.
화면을마우스오른쪽버튼으로클릭하고완료를선택하거나 Esc 키를눌러설정메뉴로돌아갑니다. 녹색경로는객체에대한로봇동작을표시합니다.
공구속도및접근/후퇴이동을각커브에적용해야하는경우와같이설정오른쪽위에서일부추가옵션을사용할수있습니다. 기본설정은다음이미지에표시됩니다.
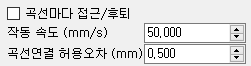
참고:프로그램 이벤트설정을사용하면접근및후퇴동작중모션속도를변경할수있습니다.
커브 불러오기
유틸리티➔커브 불러오기를선택하여 CSV 파일또는텍스트파일에서 RoboDK로커브를가져올수있습니다. 스테이션에커브로객체들을보여주는새로운아이템이나타납니다.
팁:이미지에표시된것과같은 CSV 파일(.csv 형식)을끌어놓아파일을커브로자동으로가져옵니다.
파일은커브의각점의 3D 좌표를가진텍스트파일일수있습니다. 선택적으로공구의 Z 축방향을 i, j, k 벡터로제공할수있습니다.
참고: STEP 또는 IGES 파일이RoboDK에로드될때객체모서리가자동으로추출될수있습니다(자세한내용은STEP/IGES 가져오기섹션에서제공).
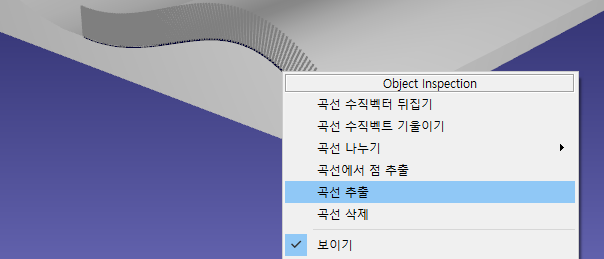
선택적으로객체의기존커브를 CSV 파일로내보내고(커브를마우스오른쪽버튼으로클릭한다음커브내보내기를선택) RoboDK에서수정하고다시가져올수있습니다.