커브
유틸리티➔커브 불러오기를선택하여 CSV 파일또는텍스트파일에서 RoboDK로커브를가져올수있습니다. 스테이션에커브로객체들을보여주는새로운아이템이나타납니다.
팁:이미지에표시된것과같은 CSV 파일(.csv 형식)을끌어놓아파일을커브로자동으로가져옵니다.
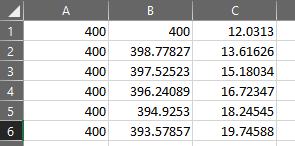
파일은커브의각점의 3D 좌표를가진텍스트파일일수있습니다. 선택적으로공구의 Z 축방향을 i, j, k 벡터로제공할수있습니다.
참고: STEP 또는 IGES 파일이RoboDK에로드될때객체모서리가자동으로추출될수있습니다(자세한내용은STEP/IGES 가져오기섹션에서제공).
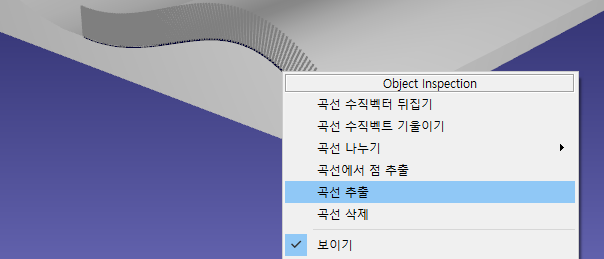
선택적으로객체의기존커브를 CSV 파일로내보내고(커브를마우스오른쪽버튼으로클릭한다음커브내보내기를선택) RoboDK에서수정하고다시가져올수있습니다.