툴
공구오프셋경로를사용하면공구경로를따라공구의기본방향을변경할수있습니다. 이옵션은주로 TCP의 Z 축을중심으로공구를회전시키는데사용됩니다.
참고: 일반적으로로봇가공공구는절삭축을따라 Z 축이바깥쪽을향합니다. 공구의 Z 축은기본적으로공구경로법선과일치합니다.
6축로봇은3축또는5축 CNC 제조프로그램을따르는데사용되므로추가로자유롭게정의할수있습니다. 이자유도는일반적으로 TCP의 Z 축을중심으로한회전입니다.
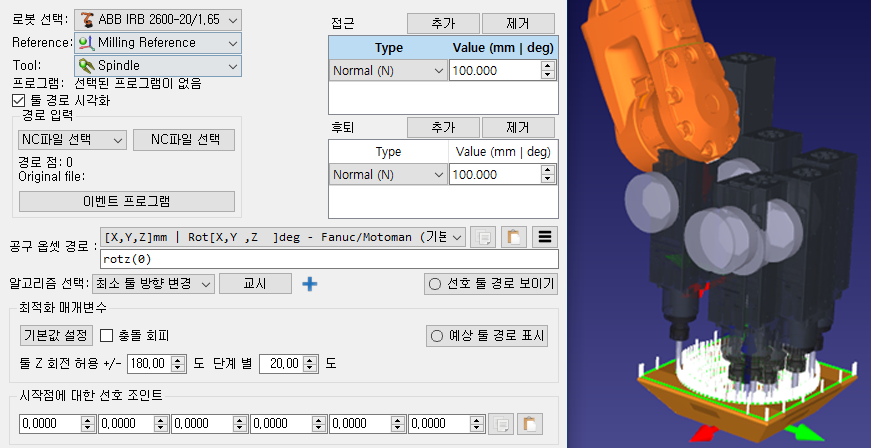
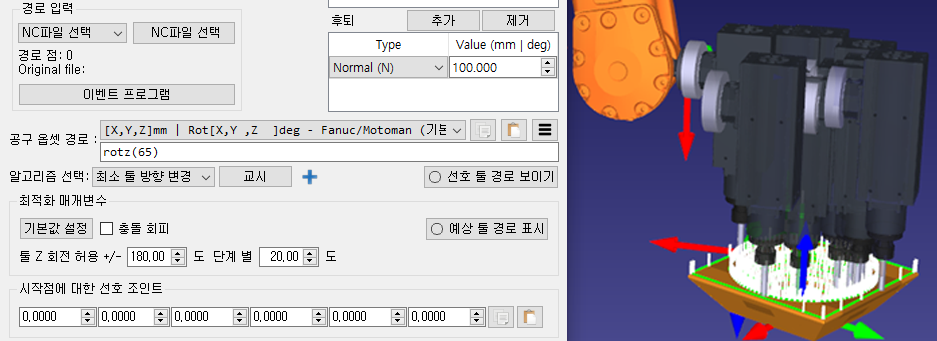
기본적으로공구옵셋경로에는rotz (0)변환이표시됩니다. 이값은공구의기본방향을설정하고 TCP의 Z 축주위의방향을수정하거나다른축과조합하여수정할수있습니다. 선호되는방향은공구경로를따르는동안로봇이유지하려고하는방향입니다.
팁: 기준 좌표계섹션은위치및방향을입력하는다른방법에대한자세한정보를제공합니다.
기본적으로 RoboDK는최소 공구 방향 변경알고리즘을사용합니다. 이는공구방향이공구경로를따라가능한일정하게유지됨을의미합니다. 일반적으로이옵션은로봇조인트이동을최소화하므로밀링작업에적합합니다. 또는공구 경로를 따르는 공구 방향(절삭작업에유용) 또는공구경로를로봇공구에부착해야하는경우(예: 디스펜싱또는연마) 물체를 고정하는 로봇과같은다른알고리즘 / 방법을응용하여사용할수있습니다.
팁: 방향이변경될때결과를즉시표시하려면기본도구경로 표시버튼을선택하십시오.
팁: 커서가rotz (0)텍스트위에있는동안마우스휠을사용하여방향을점진적으로수정하십시오.