가공
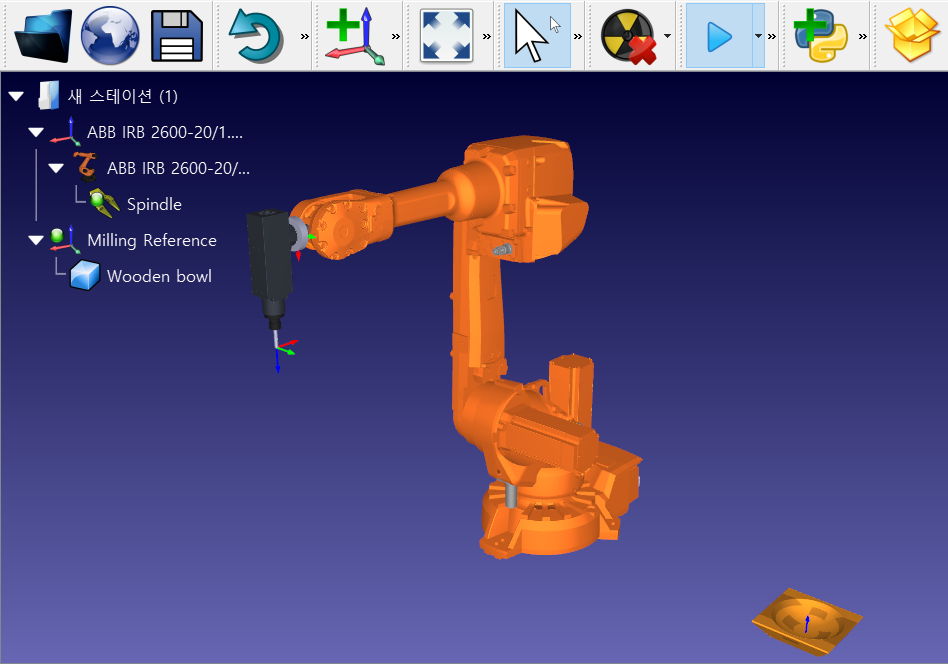
이섹션에서는로봇가공을위해오프라인으로간단한 RoboDK 스테이션을준비하는방법을보여줍니다. RoboDK 스테이션에는모든로봇, 툴, 기준좌표계, 객체및기타설정이포함되어있습니다. RoboDK 스테이션구축에대한추가정보는시작하기섹션에서확인할수있습니다.
로봇가공프로젝트를설정하려면기준좌표계에툴및 3D 객체가있는로봇이필요합니다.
1-로봇을선택하십시오.
a.파일➔
b.필터를사용하여브랜드별, 페이로드별로봇을찾으십시오.
예를들어, ABB IRB 2600-20/1.65(20kg 가반하중, 1.65 m 작업반경)을선택하십시오.
c.다운로드를선택하면로봇은주화면에자동으로나타날것입니다.
2-툴을선택하십시오.
a.같은온라인라이브러리에서형태➔툴을통해필터링하십시오.
b.스핀들툴을내려받으십시오.
c.툴은로봇에자동으로부착될것입니다.
툴이로드되면온라인 라이브러리를닫아도됩니다.
팁: 스테이션트리에서로봇으로개체를끌어다놓아개체를툴로변환할수있습니다. 자세한내용은여기를참조하십시오.
3-기준좌표계를추가하십시오.
a.프로그램➔
b.트리에서새기준좌표계를선택하고 F2를선택하여이름을Milling Reference로변경하십시오.
4-객체를추가하십시오.
a.파일➔
b.Object wooden bowl.sld라는객체를선택하십시오.
c.스테이션트리내부에서객체를Milling Reference로끌어다놓으십시오.
팁: 객체대신기준좌표계를이동하십시오. 로봇이밀링프로그램을실행할준비가되면기준좌표계를사용하여부품을찾습니다.
참고: RoboDK 스테이션은하나의파일(RDK 파일)에저장됩니다. 로봇파일, 툴및객체의별도사본을보관할필요는없으며 RDK 파일에저장됩니다.