Navigation offcanvas
- 기본 안내
- 시작하기
- 인터페이스
- 옵션 메뉴
- 로봇 프로그램
- 로봇 가공
- RoboDK CAM
- 팁과 요령
- 일반 팁
- Add-ins
- Plugins for CAD/CAM
- CAD/CAM 소프트웨어용 RoboDK Add-Ins
- RoboDK Plugin for BobCAD-CAM
- RoboDK Plugin for FeatureCAM
- RoboDK Plugin for FreeCAD
- Fusion 360을 위한 RoboDK 추가기능
- RoboDK Plugin for hyperMILL
- Inventor용 RoboDK 추가기능
- RoboDK Plugin for Mastercam
- RoboDK Plugin for MecSoft
- RoboDK Add-in for Onshape
- Rhino용 RoboDK 추가 기능
- 지멘스 솔리드 엣지용 RoboDK Add-in
- SolidWorks용 RoboDK 추가기능
- 충돌 감지
- Examples
- Robot Tips
- 포스트 프로세서
- 가상 현실
- RoboDK API
- 로봇 드라이버
- Accuracy
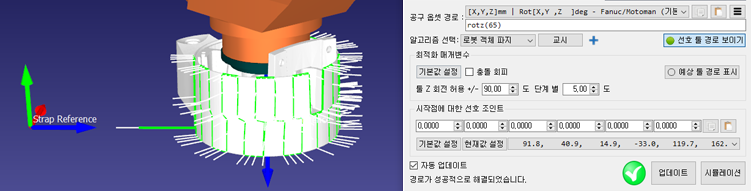
제조작업이진행되는동안로봇과함께공구로물체 / 공구경로를잡고있을때로봇을프로그래밍할수있습니다. 이러한방법은접착제를공급하거나연마응용분야에유용합니다.
TCP 경로에공구경로를올바르게배치하기위해알고리즘 선택드롭다운에서로봇으로 객체 잡기를선택하십시오. 다른설정은공구방향이일정한가공 프로젝트와같습니다.
중요:공구방향이변경된경우, 공구경로의포인트를서로가까이두는것이좋습니다.