I/O
프로그램 ➔
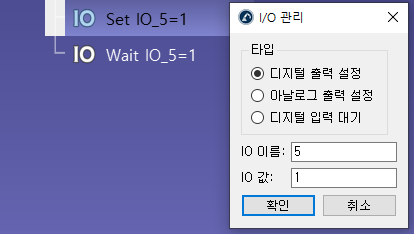
IO 이름은명명된변수면숫자또는텍스트값일수있습니다. IO 값은숫자(False의경우 0, True의경우 1)이거나이름이지정된상태인경우텍스트값일수있습니다.
참고: 이명령어는일부로봇컨트롤러에서아날로그출력(AO) 설정또는아날로그입력(AI) 대기를지원합니다. 이경우숫자대신10진수또는특정텍스트를제공할수있습니다.
특정입력이특정값으로변경될때까지프로그램실행을중지하려면디지털입력대기를설정하십시오. 또한, 대부분의로봇컨트롤러는대기시간이특정값을초과하는경우오류를제기하기위해시간초과지연을지원합니다. 이기능을활성화하려면시간초과(ms) 옵션을확인하십시오.
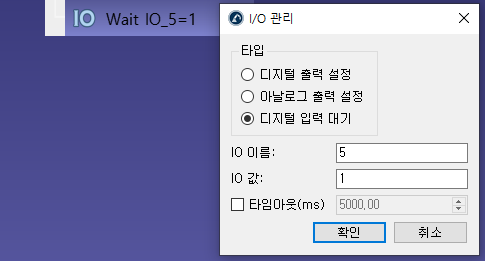
팁: 로봇에그리퍼나밀링스핀들과같은셀에특정하드웨어가있는경우디지털출력(DO)을사용하여이특정하드웨어를활성화한다음특정상태로전환하는디지털입력(DI)을기다리는것이좋습니다.
시뮬레이션된디지털입력및디지털출력을변경하면새로운스테이션변수가생성됩니다. 이러한변수의상태를확인하려면스테이션을마우스오른쪽버튼으로클릭하고스테이션매개변수를선택하십시오. API를통해이러한변수를읽거나수정할수도있습니다.