선형
새로운선형이동명령을추가하려면프로그램➔
명령을추가하기전에대상을선택하지않으면이동명령이새대상을생성하고연결됩니다. 대상이이동하면이동도수정됩니다.
조인트이동과선형이동은같은방식으로작동하며한유형에서다른유형으로쉽게전환할수있습니다.
조인트이동명령과마찬가지로프로그램에추가된첫번째명령인경우, 이동명령전에기준 좌표계 선택과툴 좌표계 선택이라는두가지명령이추가됩니다.
중요:조인트대상을사용하여각프로그램의첫번째움직임을조인트이동으로유지하는것이좋습니다. 이렇게하면첫번째이동에서원하는구성이올바르게설정되고실제로봇이시뮬레이션된것과같은방식으로이동하는지확인할수있습니다.
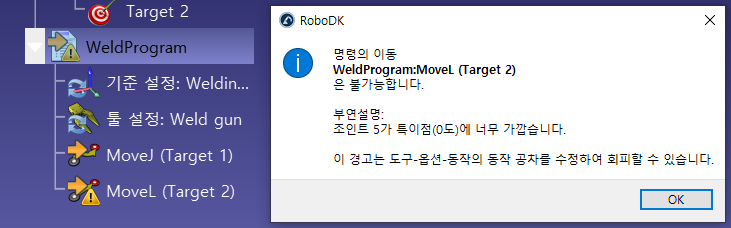
조인트움직임과달리선형움직임은로봇특이성과축제한에민감합니다. 예를들어, 6축로봇은직선이동후에특이점을넘을수없습니다. 다음그림은관절 5가특이점 (0도)에너무가깝다는예를보여줍니다. 그림에서와같이 […] 대신조인트이동을고려하십시오.
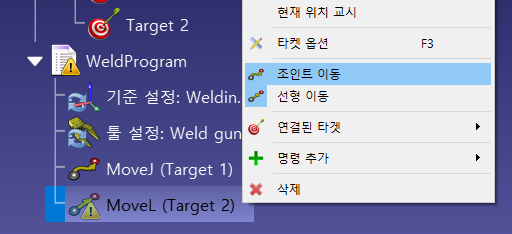
직선이동이꼭필요하지않으면이동명령을마우스오른쪽버튼으로클릭하고조인트명령으로변경하십시오.
또는, 특이점을피하기위해대상, TCP 또는기준좌표계의위치를수정해야합니다.