기준
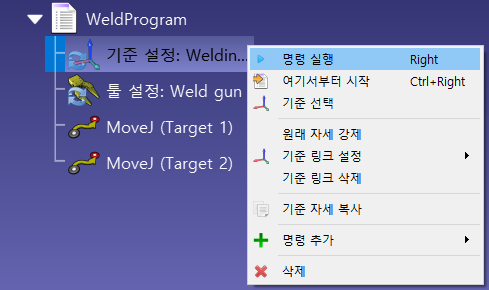
특정기준좌표계를사용하려면프로그램➔
기준좌표계는 Work Object(ABB 로봇), UFRAME(Fanuc 로봇), FRAME(Motoman 로봇) 또는 $BASE(KUKA 로봇)로도알려진변수입니다.
참고:특정컨트롤러는번호가매겨진기준좌표계(예: Fanuc 및 Motoman 컨트롤러)을사용하여기준좌표계설정을지원합니다. 이경우기준좌표계의이름은숫자로끝날수있습니다(예: 좌표계인덱스 4를설정하는Frame 4).
특정기준좌표계를사용하려면프로그램➔
기준좌표계는 Work Object(ABB 로봇), UFRAME(Fanuc 로봇), FRAME(Motoman 로봇) 또는 $BASE(KUKA 로봇)로도알려진변수입니다.