볼바
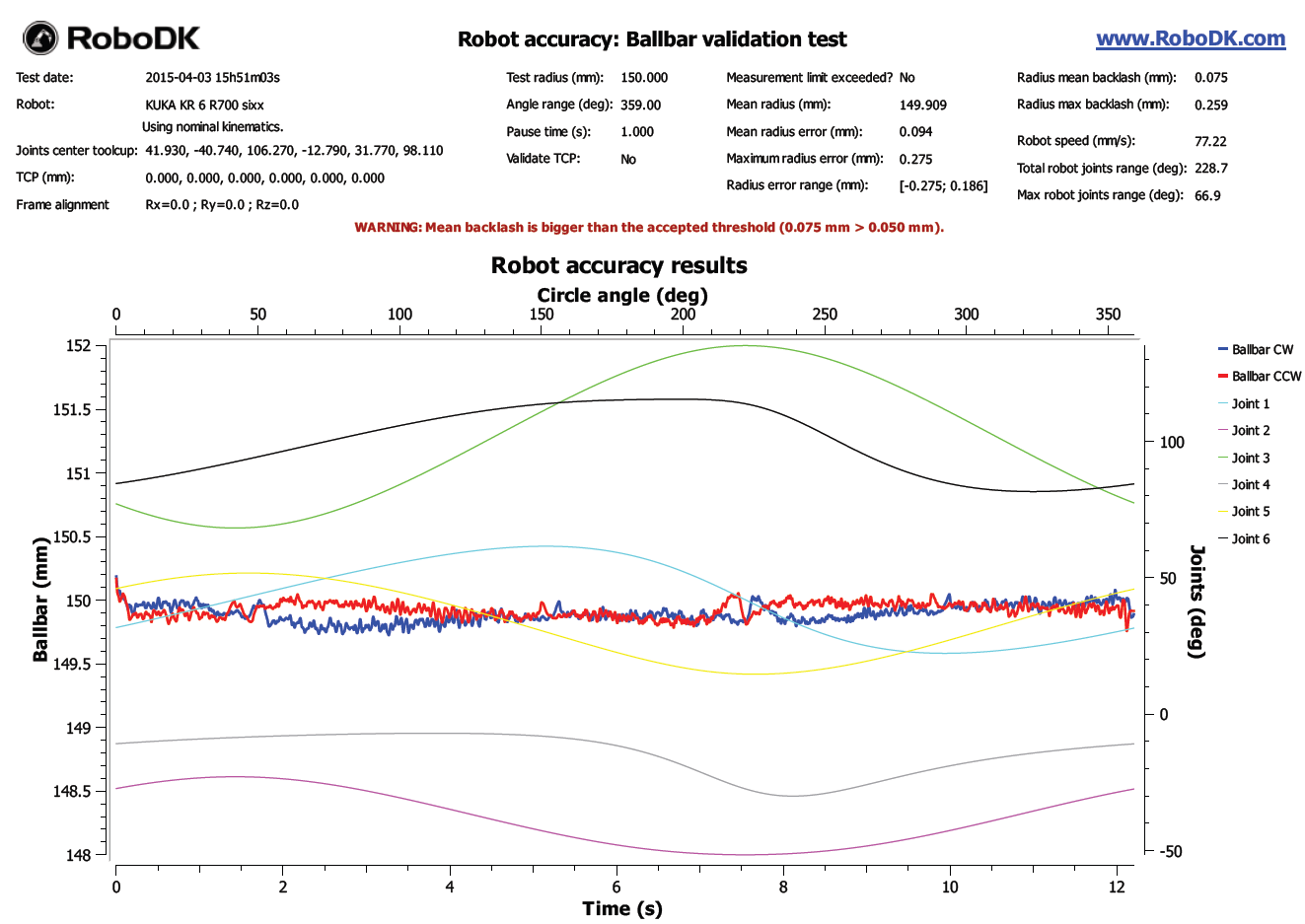
볼바테스트가완료되면다음그림과같은 PDF 보고서를확인할수있습니다.
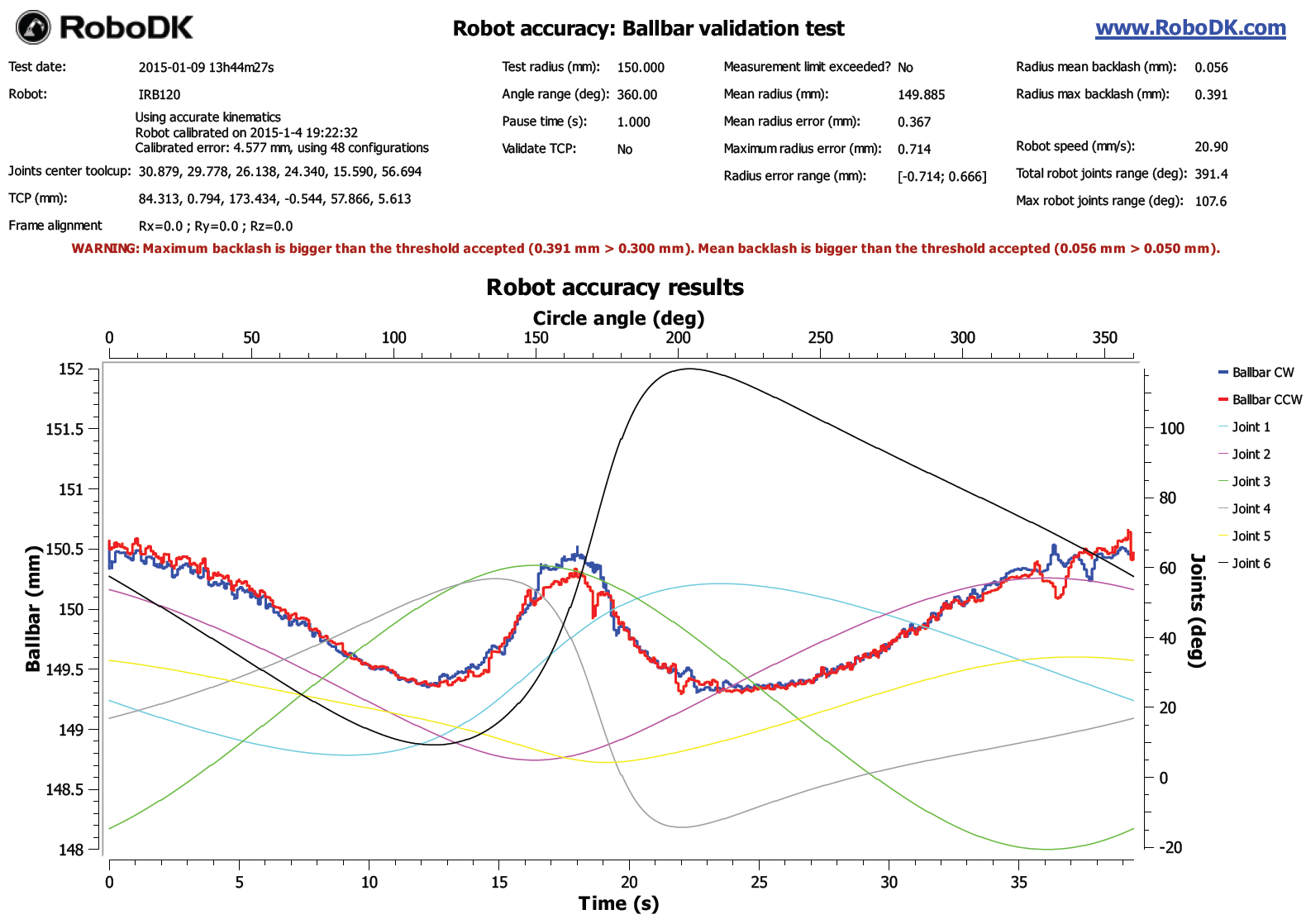
이보고서에는초단위시간 (아래 X 축)에대한시계방향및반시계방향이동(각각파란색및빨간색선)에대한볼바판독값(mm, 왼쪽의 Y 축)이표시됩니다. 로봇조인트도표시됩니다. 로봇조인트는원각도에대해각도 (오른쪽 Y 축)로표시됩니다(360도는전체회전을의미합니다). 결함이있는모터는해당조인트움직임이방향을바꿀때상당한백래시를감지하여상당한측정변화를보여줍니다.
백래시가주어진임곗값보다큰경우이보고서는사용을제한합니다. 임곗값은메뉴도구 ➔ 옵션 ➔ 정확도탭에서정의할수있습니다.
부록– 블루투스연결 #BallbarBluetooth
이섹션에서는컴퓨터와볼바사이에블루투스연결을설정하는방법에관해설명합니다. 통신이작동하려면먼저 Windows를사용하여컴퓨터와볼바장치간의통신을설정해야합니다.
"Windows 블루투스스택"이활성화되어있어야합니다(Windows의기본블루투스관리자). 그리고다음단계에따라첫번째연결을설정하십시오.
1.Windows 시작버튼을선택하십시오.
2.제어판을선택하십시오.
3.블루투스키워드를찾으십시오.
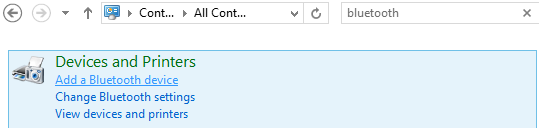
4.블루투스장치를선택하십시오.
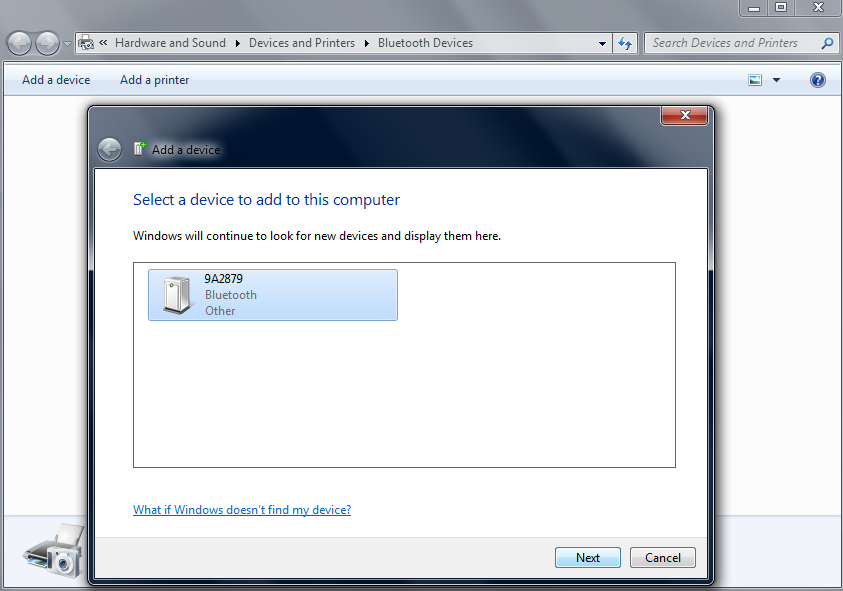
5.볼바장치가보이지않으면장치 추가를선택하십시오.
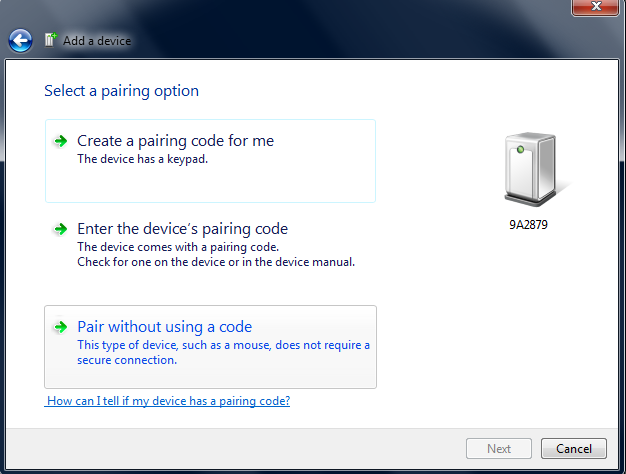
6.장치가나타나면장치를선택하고다음을선택하십시오. 표시되는번호는장치에인쇄된볼바일련번호입니다.
7.마지막으로코드를 사용하지 않고 페어링을선택하십시오.
이제블루투스장치가 RoboDK를통해측정할준비가되었습니다.
일부노트북(최근컴퓨터의경우에도)에통합된블루투스동글을사용하는경우블루투스연결이매우제한될수있습니다. 이런경우외부블루투스동글을구입하여연결이문제없이작동하도록하는것이좋습니다.
컴퓨터가볼바장치에서멀리떨어지면안됩니다. 연결에문제가발생하면블루투스동글용 USB 연장케이블을사용하는것이좋습니다.