볼바
볼바테스트매개변수메뉴에서다음화면을볼수있습니다. 스테이션에서볼바 정확도 검증항목을두번클릭하여액세스할수있습니다(이전단계참조).
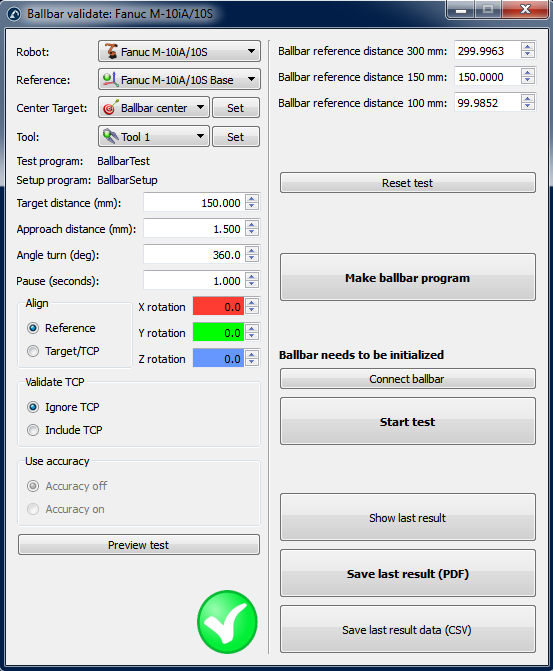
볼바테스트는기본적으로실행가능하지않을수있습니다. 테스트의가능성은이러한모든매개변수와센터툴컵의로봇조인트및 TCP 위치에따라다릅니다.
처음에테스트를실행할수없는경우 "미리보기테스트"를선택하면불완전한시퀀스가표시될수있습니다. 이경우프로그램이실행가능하도록“각도회전(도)”을줄일수있습니다. 그렇지않으면원의반경을줄일수있습니다( "대상거리"). Renishaw의볼바를사용하면 +/- 1mm의오차로 100mm, 150mm 및 300mm의거리를테스트할수있습니다. "접근거리(mm)" 및일시정지( "일시정지 (초)")를기본값으로둘수있습니다. 이매개변수를사용하면테스트시작및종료를감지할수있습니다.
테스트평면은로봇기본기준좌표계(“정렬”섹션의“기준”)를기준으로합니다. 이는로봇기준좌표계의 XY 평면이원을만드는데사용됨을의미합니다. 툴기준좌표계와관련하여테스트를선택할수있습니다. 이경우툴의 XY 평면이사용됩니다(중심을가르쳤을때). 두경우모두기준좌표계의 X, Y 및/또는 Z 축에대한회전을추가할수있습니다.
유효성검사에서도구추가와같은특정매개변수를변경하면 "중요: TCP는정확해야합니다"라는메시지가나타납니다. 이는툴중심을기준으로이동이계산됨을의미합니다. 그렇지않으면 TCP 오류가발생할수있으며테스트는가능할것입니다.
"TCP 포함" 옵션을선택하면원을따라이동하면서공구방향이변경됩니다. 이옵션을사용하면로봇과툴의오차를하나의시스템으로평가할수있습니다. 그렇지않으면로봇의오류만확인합니다( "TCP 무시").