볼바
이섹션에서는볼바측정에필요한단계를설명합니다.
두가지로봇프로그램이필요합니다.
●BallbarSetup: 이프로그램을사용하면로봇조인트를기록한곳과같은위치에서볼바테스트센터(센터툴컵)를설정할수있습니다.
●BallbarTest: 이프로그램은볼바로측정을수행하기위한중앙툴컵주위의원형경로입니다.
중앙툴컵이올바른위치에있도록하려면 BallbarSetup 프로그램을실행하십시오. 로봇은선형접근방식으로중심점으로이동합니다. 그런다음자기지지대를배치하고고정하십시오.
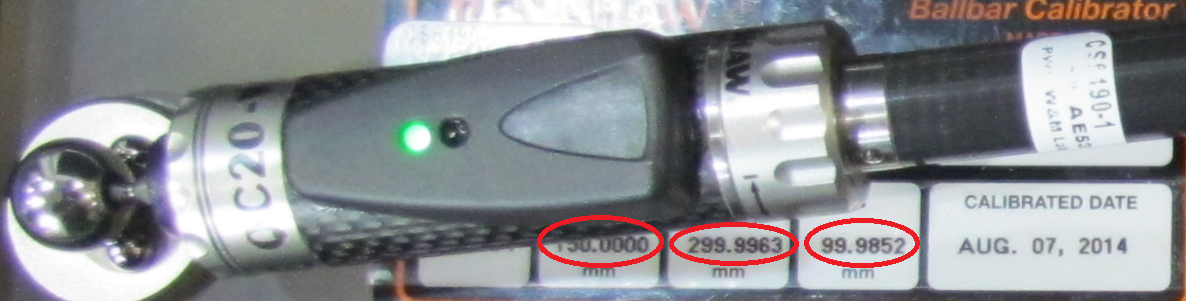
볼바키트의마스터링매개변수를올바르게입력했는지확인하십시오(다음그림참조). 이값은테스트매개변수메뉴의 "볼바기준거리..."에삽입해야합니다. 볼바는이거리를 1 마이크로미터정확도로플러스또는마이너스 1mm로측정할수있습니다. 산업용로봇에는정확도가충분하지만경우에따라측정범위가제한될수있습니다.
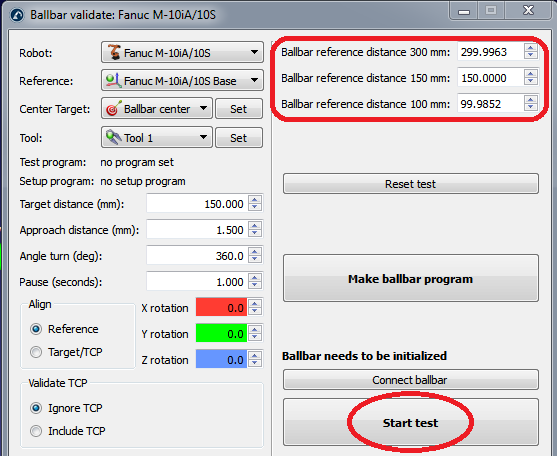
"테스트시작"을선택하여테스트를시작할수있습니다(이전에 "연결볼바"를선택할필요는없음). 볼바연결상태를보여주는새로운창이나타납니다. 볼바가감지되지않았거나문제가있는경우볼바연결창을닫고볼바장치를끈다음다시켜서테스트를다시시작해야합니다. 문제가지속되면블루투스연결이올바른지확인하십시오.
볼바로블루투스연결이설정되면 RoboDK는사용자에게다음단계를따르도록안내합니다.
1.테스트를위해선택한거리로볼바를초기화하십시오.
2.로봇을시작위치로옮기십시오(계속하기전에프로그램이일시정지됩니다).
3.볼바를로봇에배치하십시오.
4.컴퓨터화면에서확인을선택하여테스트를시작하십시오. 로봇티치펜던트를계속하기로선택하기전까지는로봇이움직이지않습니다.
5.모든것이정확하면볼바전류측정을보여주는새창이나타납니다.
6.로봇프로그램을계속진행하여경로를따라이동할수있습니다.
7.로봇이움직임을마치면측정을중지하십시오(시계방향및시계반대방향).
테스트가완료되면 RoboDK는테스트결과를표시하고사용자에게보고서를 PDF 형식으로저장하도록요청합니다.
4단계는테스트의시작과끝을감지하는데중요합니다. 로봇이측정의시작과끝을(경로의시작과끝지점에서) 트리거하기위해약 1.5mm의반경방향으로이동하기때문에이러한한계가감지됩니다.