오프라인
테스트를위한경로와위치를준비하기위해 RoboDK(오프라인설정)에서실제설정의가상환경을구축하는것이좋습니다. 로봇과트래커를설치하기전에 RoboDK가설치된컴퓨터만사용할수있습니다. RoboDK 교정및경로검증설정예제는다음폴더에서다운로드할수있습니다.
https://www.robodk.com/downloads/calibration/
RoboDK에는ISO 9283 표준에명시된구성및권장경로를생성하는유틸리티가있습니다. 이유틸리티를사용하려면다음단계를수행하십시오.
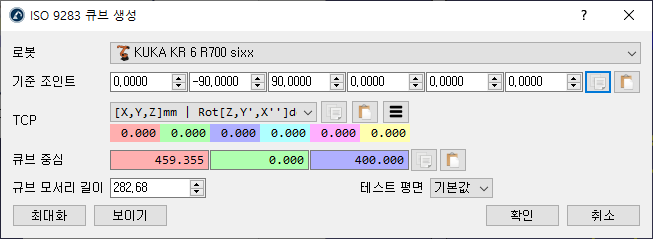
1.유틸리티 ➔ ISO 9283 큐브 생성(대상및경로)
2.기준조인트를입력하십시오 (공구가트래커를향하는로봇위치).
3.큐브의위치와크기를조정하십시오.
4.확인을선택하십시오.
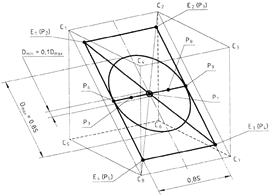
이를통해 ISO 표준에설명된5가지대상과경로정확도테스트에권장되는경로가생성됩니다. 이대상과경로는로봇앞에있는큐브안에남아있습니다. 원하는큐브면을설정하고중심(타겟“ISO p1”)과경로의방향을정의할참조조인트를이동할수있습니다. 로봇작업공간에맞는가장큰큐브를찾기위해큐브크기를최대화할수도있습니다.
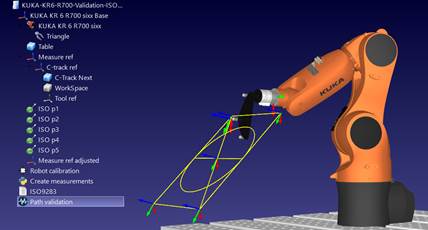
로봇보정및로봇검증옵션이있는샘플스테이션이다음그림에나와있습니다.