포스트
이섹션에서는브룩스로봇용프로그램생성과관련된몇가지팁을설명합니다.
도구 중심점(TCP)
RoboDK와컨트롤러의공구중심점(TCP)이일치해야합니다. 그리퍼메커니즘을사용하는경우예상위치에있는 "도구추가(TCP)"를사용하여 TCP를추가해야합니다. 새도구 TCP는그리퍼메커니즘 TCP와일치해야합니다. 브룩스프리시전플렉스로봇의공구중심점(TCP)과관련된정보는웹인터페이스로이동하여다음단계를수행하면확인할수있습니다:
1.관리자
2.설정 - 파라미터데이터베이스
3.로봇
4.조인트/데카르트제어
5.동적매개변수
6.DataID 16051
그리퍼
포스트프로세서와호환되는그리퍼명령어를올바르게정의하는방법은이전섹션그리퍼 참조하세요. 이접근방식은 GPL 프로젝트에서위치를올바르게정의하여그리퍼의축/축의예기치않은움직임을방지합니다.
라운딩
입력값이 -1이면로봇이동작이끝날때멈추고엄격한위치오류제약조건이적용됩니다(GPL 코드: prof1.InRange = 100).
입력값이 0이면로봇이동작이끝날때멈추지만작은위치오차제약조건이적용됩니다(GPL 코드: prof1.InRange = 10).
입력값이 0보다크면로봇이동작이끝날때멈추지않고혼합동작이실행되도록결정합니다(GPL 코드: prof1.InRange = -1).
속도 및 가속도
브룩스프리시전플렉스로봇의최대선형, 각도및관절속도/가속도와관련된정보는웹인터페이스로이동하여다음단계를수행하면확인할수있습니다:
1.관리자
2.설정 - 파라미터데이터베이스
3.로봇
4.조인트/데카르트제어
5.동적매개변수
6.DataID 2700, 2701, 2702 및 2703
사용자는위의 DataID 값을참조로사용하여 RoboDK 속도/가속명령의입력을설정할수있습니다. 그러면정밀포스트프로세서는이값을사용하여 GPL 프로필클래스에서요청한대로각로봇의최대속도/가속도의백분율로속도/가속도를계산합니다.
포스트프로세서가사용하는제한을변경하려면사용중인특정로봇에따라포스트프로세서를수정하면됩니다. 기본적으로포스트프로세서는 PF400 및 PF3400 로봇의제한을사용합니다. 포스트프로세서를수정하려면설명서의 https://robodk.com/doc/en/Post-Processors.html#PPEditor 섹션을참조하세요.
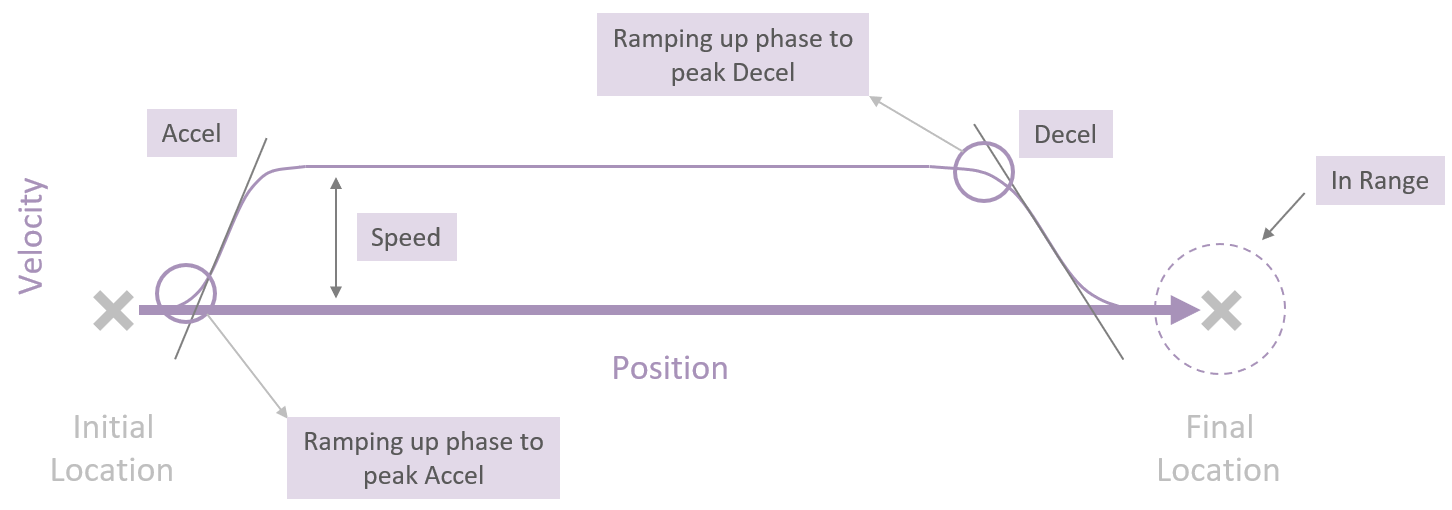
1보다작은입력값을선형및각도가속명령어와함께사용하는경우, 이입력값은최대가속/감속까지램프업하는기간(초)으로사용됩니다(GPL 코드: prof1.AccelRamp/prof1.DecelRamp = 입력값).
아래이미지는위에설명한개념과컨트롤러가로봇이따라야하는궤적을계획하는방법과관련된추가정보를제공합니다.
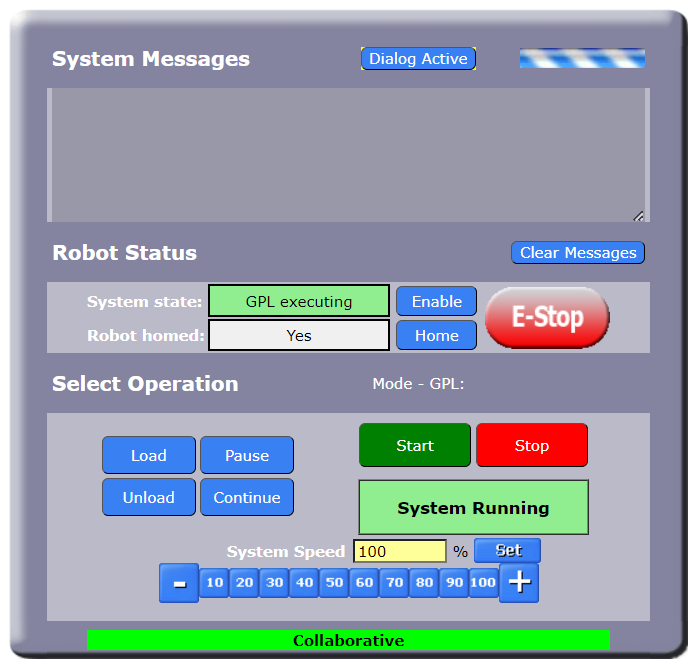
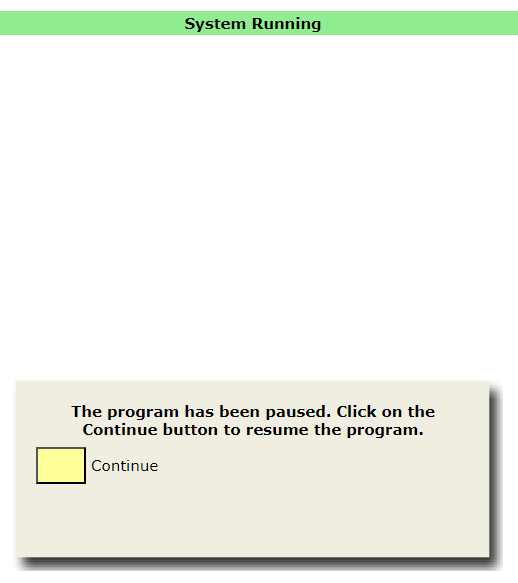
일시정지
입력값을 0보다크게설정하면입력값에정의된시간동안프로그램을일시중지하는 GPL 명령이생성됩니다. 입력값이음수이면웹인터페이스운영자제어판에서팝업대화상자가열리고사용자가대화상자의 "계속" 버튼을클릭할때까지프로그램이일시중지됩니다. 대화상자를시각화하려면운영자제어판에서 '대화상자활성화' 버튼을클릭해야합니다.