속도
브룩스프리시전플렉스로봇의최대선형, 각도및관절속도/가속도와관련된정보는웹인터페이스로이동하여다음단계를수행하면확인할수있습니다:
1.관리자
2.설정 - 파라미터데이터베이스
3.로봇
4.조인트/데카르트제어
5.동적매개변수
6.DataID 2700, 2701, 2702 및 2703
사용자는위의 DataID 값을참조로사용하여 RoboDK 속도/가속명령의입력을설정할수있습니다. 그러면정밀포스트프로세서는이값을사용하여 GPL 프로필클래스에서요청한대로각로봇의최대속도/가속도의백분율로속도/가속도를계산합니다.
포스트프로세서가사용하는제한을변경하려면사용중인특정로봇에따라포스트프로세서를수정하면됩니다. 기본적으로포스트프로세서는 PF400 및 PF3400 로봇의제한을사용합니다. 포스트프로세서를수정하려면설명서의 https://robodk.com/doc/en/Post-Processors.html#PPEditor 섹션을참조하세요.
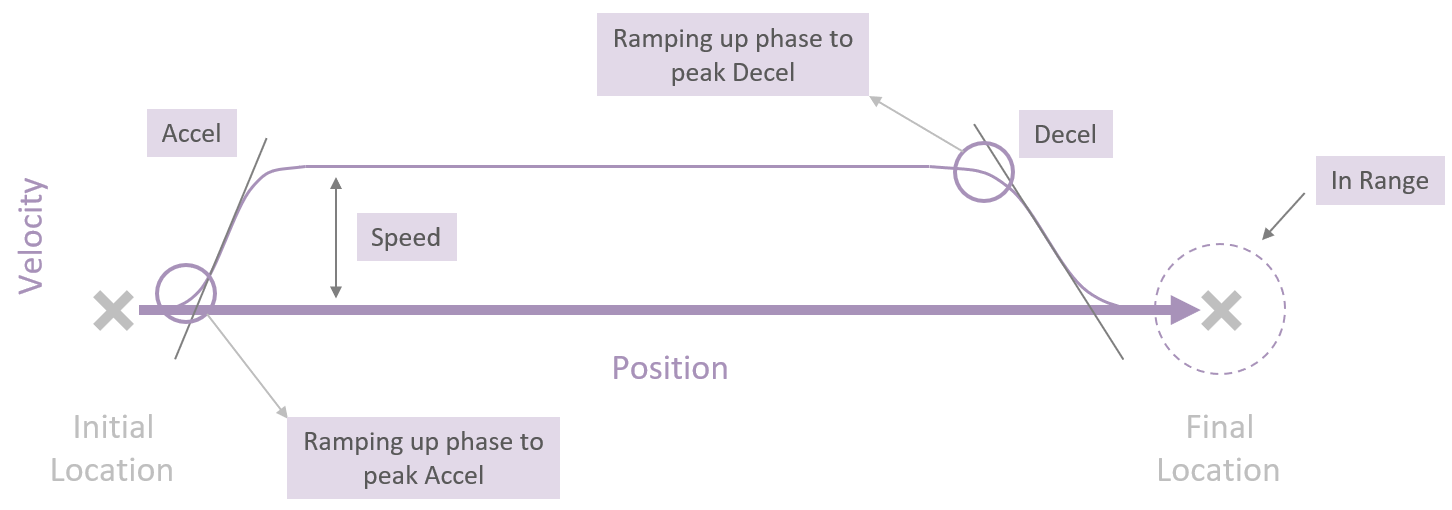
1보다작은입력값을선형및각도가속명령어와함께사용하는경우, 이입력값은최대가속/감속까지램프업하는기간(초)으로사용됩니다(GPL 코드: prof1.AccelRamp/prof1.DecelRamp = 입력값).
아래이미지는위에설명한개념과컨트롤러가로봇이따라야하는궤적을계획하는방법과관련된추가정보를제공합니다.