코마우 로봇
이문서섹션에서는 RoboDK에서프로그램을생성하여 Comau 로봇컨트롤러에로드하는등 Comau 로봇을사용할때일반적인작업에대한개요를제공합니다.
로봇 프로그램 전송
이섹션에서는코마우로봇컨트롤러에프로그램을로드하는방법을안내합니다.
FTP를통해프로그램양식을프로그램메모리로로드하려면다음단계를따르세요.
1.로봇의연결탭에서 IP 주소를올바르게구성합니다. FTP 사용자아이디와비밀번호가기본값이아닌경우'추가옵션'에서구성할수있습니다.
2.프로그램을전송하려면프로그램을마우스오른쪽버튼으로클릭하고 "로봇으로보내기"를선택하기만하면됩니다.
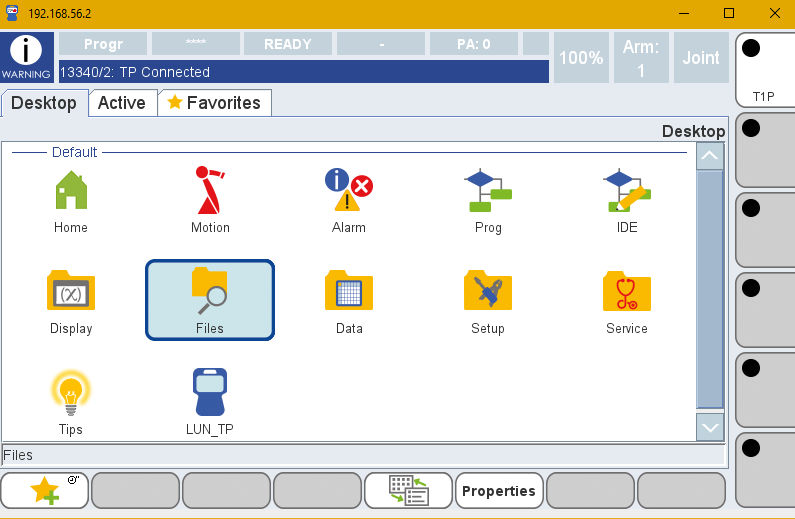
3.로봇컨트롤러의티치펜던트메인메뉴에서 '파일'로이동합니다.
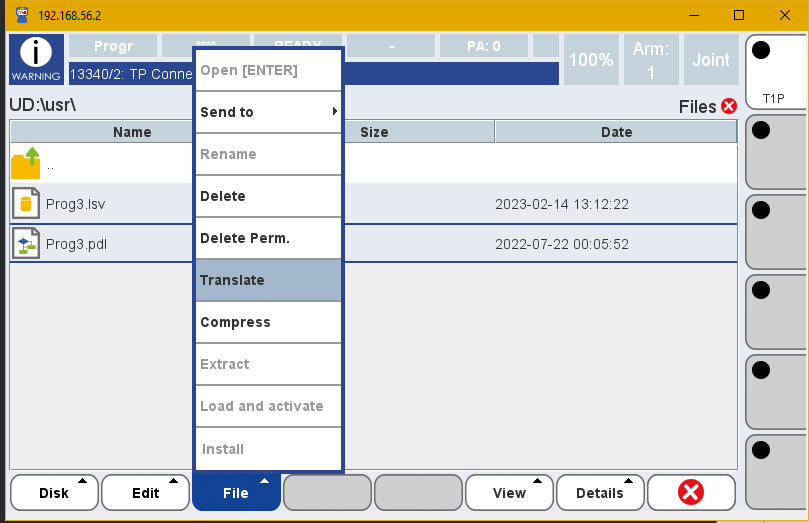
4.필요한경우 PDL 프로그램과해당 LSV를선택하고파일->번역을클릭하여프로그램을해당컴파일된버전으로변환합니다.
5.이제컴파일된파일을메모리에로드하고메인인터페이스의 "Prog" 옵션을통해실행할수있습니다.
RoboShop에서가상로봇과함께RoboDK를사용할때최대동시 FTP 연결수를늘리면파일을전송할때마다가상티치펜던트의연결이끊어질수있습니다. 가상로봇에서터미널을열고다음작업을수행하면이작업을수행할수있습니다.
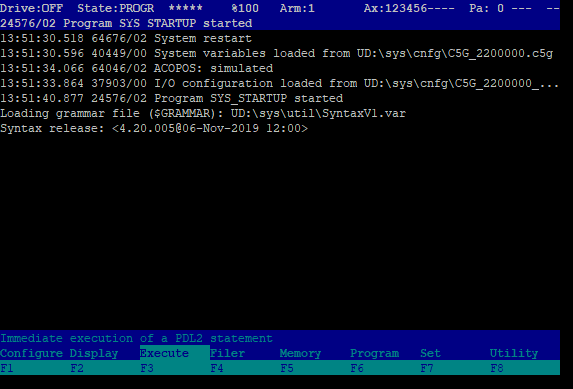
Roboshop의터미널로이동하여로봇의터미널내부에서다음단계를따르세요,
1.실행(F3)을선택합니다.
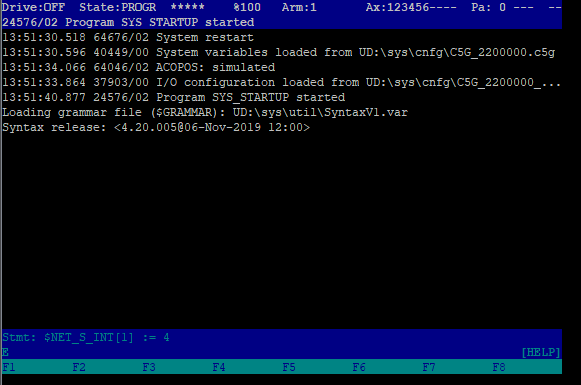
2."$NET_S_INT[1] := 4"를입력합니다.
3."Enter"를눌러문장을확인합니다.
4.'Enter'를한번더눌러문을실행합니다.
포스트 프로세서
Comau 로봇에대한로봇프로그램을생성할때로봇이 MODAL 또는 NODAL 프로그램에맞게구성되어있는지확인하는것이중요합니다.
노드프로그램의경우로봇을마우스오른쪽버튼으로클릭한다음 "포스트프로세서선택" 버튼을클릭하여다음포스트프로세서를선택합니다.
●코마우노달
모달프로그램의경우로봇을마우스오른쪽버튼으로클릭한다음 "포스트프로세서선택" 버튼을클릭하고다음포스트프로세서중하나를선택합니다:
●코마우 C5G
●코마우 C5G 조인트
드라이버
Comau 로봇에서온라인프로그래밍기능을사용할수있습니다. 온라인프로그래밍기능이작동하려면드라이버 PDL 프로그램파일을실행하여 Comau 로봇컨트롤러측에서드라이버를설정해야합니다.
다음지침에따라 RoboDK용 Comau 드라이버를설정해야합니다:
1.RoboDKdriver.pdl 파일을코마우로봇컨트롤러로전송합니다.
2.로봇에서프로그램을수동으로시작합니다(로봇을서버로변환).
3.RoboDK에서로봇에연결합니다.
기본적으로사용되는통신포트는 1102이지만 RoboDKdriver.pdl 파일에서변경할수있습니다.