Denso
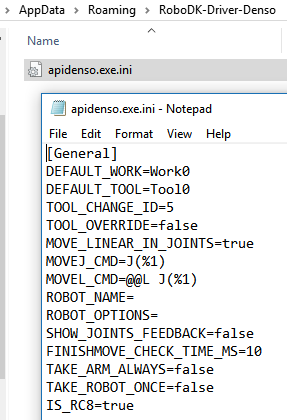
Denso 용 RoboDK 드라이버는특정동작을달성하도록고도로사용자정의할수있습니다. 이사용자정의는다음위치에있는 ini 파일을편집하여수행할수있습니다.
%APPDATA%/RoboDK-Driver-Denso/apidenso.exe.ini
이러한개별화로이동유형을지정하거나동시에하나이상의로봇을구동할수있습니다. 모든텍스트편집기를사용하여이파일을수정할수있습니다.
다음과같은변수를구성할수있습니다.
●DEFAULT_WORK – 기본적으로사용되는작업개체(변수문자열)
●DEFAULT_TOOL – 본적으로사용되는도구변수
●TOOL_CHANGE_ID – 새공구를설정할때사용할예비공구변수(예: 5 = Tool5)
●MOVE_LINEAR_IN_JOINTS – 직교목표로선형이동을제공하려면 false로설정
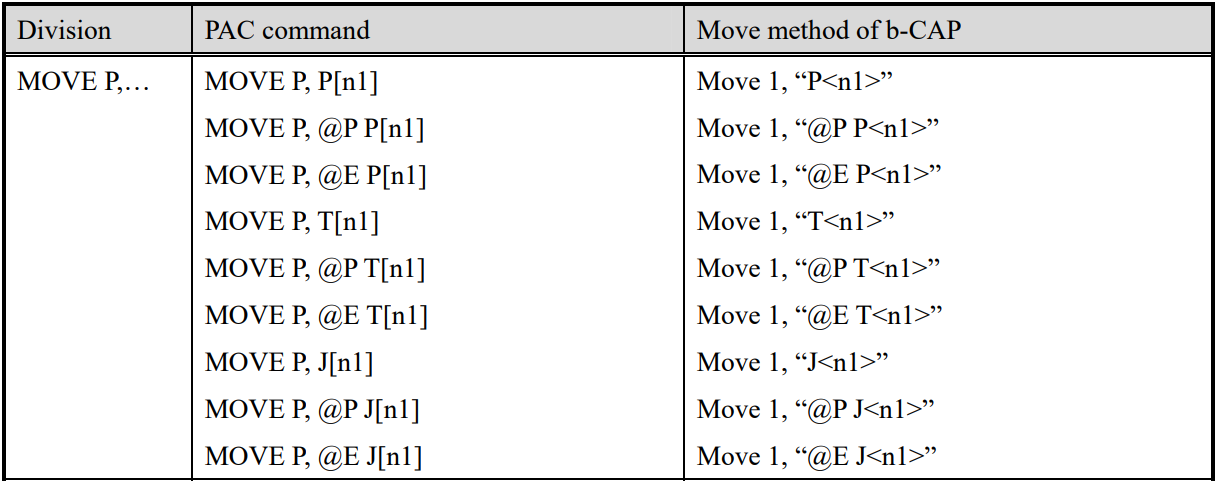
●MOVEJ_CMD – 관절이동(MoveJ)을전송하는명령. 다음표는허용되는옵션을제공합니다.
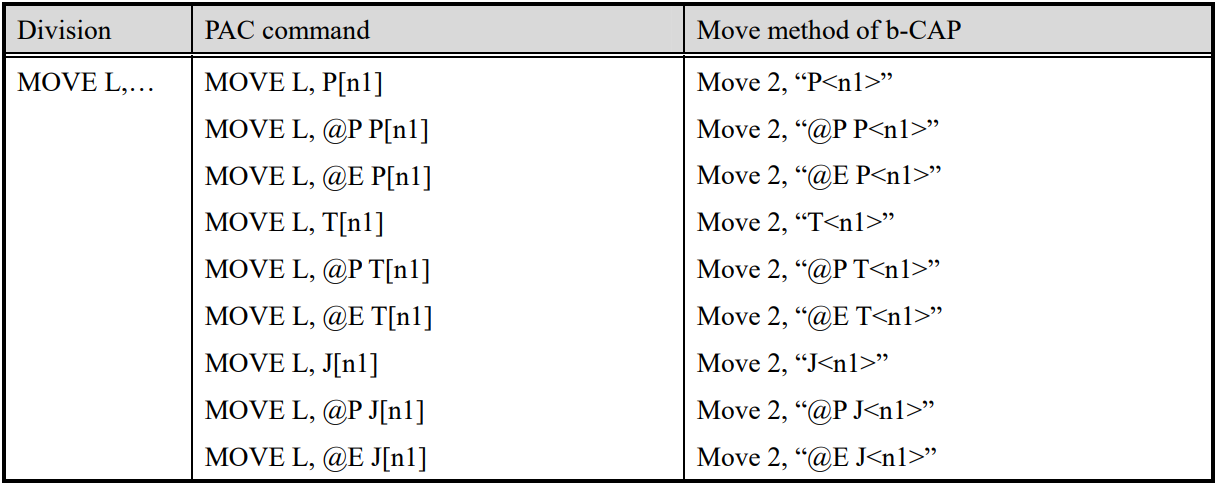
●MOVEL_CMD - 선형이동(MoveL)을전송하는명령. 다음표는허용되는옵션을제공합니다.
●ROBOT_NAME – 로봇이름. 컨트롤러의특정로봇을선택하려면이이름을지정하십시오.
●ROBOT_OPTIONS –로봇리소스를얻는로봇옵션. 예를들어컨트롤러의종속로봇을사용하는경우 ROBOT_OPTIONS =”ID = 1”을지정해야합니다. 마스터로봇(메인로봇)을사용하려면 ID가 0 (기본값)이어야합니다.
●SHOW_JOINTS_FEEDBACK – 실시간으로화면에로봇피드백을보려면 true로설정하십시오(성능이느려질수있음).
●FINISH_MOVE_CHECK_MS – 조인트피드백을표시할때화면에서로봇위치를새로고치는속도를설정합니다.
●TAKE_ARMS_ALWAYS – 로봇의연결이끊길때까지각이동후컨트롤러리소스를유지하려면 true로설정합니다(더빠르지만예기치않은결과가발생할수있음).
●TAKE_ROBOT_ONCE – 로봇이연결되어있는동안각움직임후로봇리소스를유지하려면 true로설정합니다(더빠르지만예기치않은결과가발생할수있음).
●IS_RC8 – RC7 및이전 Denso 컨트롤러에올바르게연결하려면 false로설정합니다.