Fanuc
로봇드라이버는오프라인프로그래밍(프로그램이생성된다음로봇으로전송되어실행되는)의대안을제공합니다. 로봇드라이버를사용하면로봇에서직접시뮬레이션을실행할수있습니다(온라인프로그래밍). 로봇 드라이버섹션에자세한정보가있습니다.
RoboDK를사용하여연결된 PC에서로봇을자동으로이동시키기위해 RoboDK와 Fanuc 로봇간의연결을설정할수있습니다. 이를통해온라인프로그래밍및디버깅을위해 RoboDK 로봇에서 실행옵션을사용할수있습니다. 표준이더넷연결(TCP / IP)을통해연결을설정할수있습니다.
Fanuc 용 RoboDK 드라이버를설정하려면다음단계를수행하십시오.
1.Fanuc 드라이버 프로그램 파일을다운로드하고다음의로봇프로그램을로봇컨트롤러로전송하십시오.
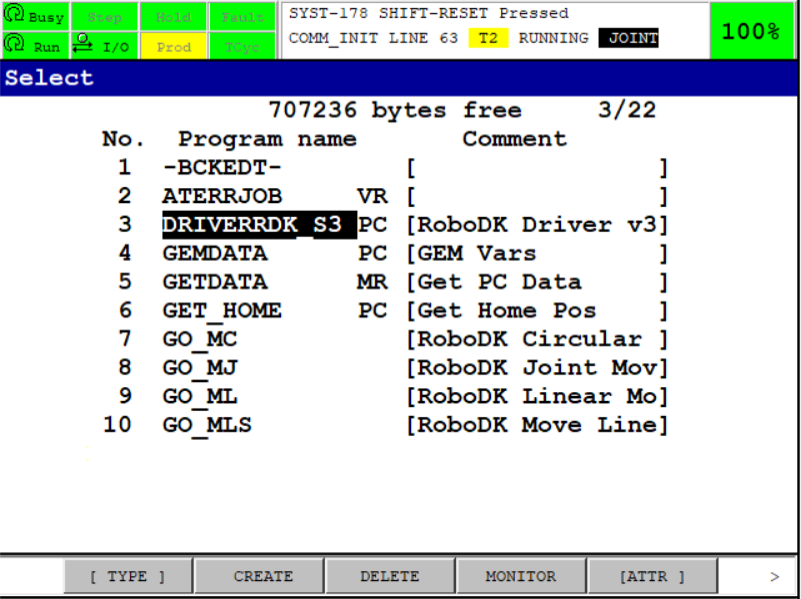
a.DRIVERRDK_S3.PC➔ S3(소켓통신포트번호 3 – S3)를통해통신을관리하는기본프로그램입니다. 올바른버전을선택하십시오(최신 Fanuc 로봇컨트롤러는 V9 폴더의버전을사용해야합니다).
b.GO_MJ.TP
c.GO_ML.TP
d.GO_MC.TP
e.GO_PROG.TP
로봇티칭펜던트에서다음단계에따라 Fanuc 로봇과 RoboDK 간의통신을준비하십시오.
1.Menu-(Next)-System-[TYPE]-Variables를선택하십시오.
a.$HOSTS_CFG(키를선택한상태에서 Shift 키를누르고있으면더빨리스크롤하는데도움이됩니다)를선택하십시오.
b.번호3을선택하십시오.
c.$SERVER_PORT를2000으로설정하십시오.
($HOSTS_CFG[3].$SERVER_PORT = 2000)
2.Menu-Setup을선택하십시오.
3.[TYPE]-Host comm을선택하십시오.
4.[SHOW]-Servers를선택하십시오.
5.“S3”-Enter를선택하십시오.
a.Protocol Name을SM으로설정하십시오.
b.Port Name에서여러포트를사용할수있는경우, 포트를P3(또는 해당 포트)로설정하십시오.
c.비활성Timeout을9999로설정하십시오.
d.시작상태를[CHOICE] START로설정하십시오.
e.현재상태를STARTED로설정하십시오.
이렇게하려면 [ACTION] -DEFINE을선택한다음 [ACTION] -START를선택하십시오.
6.DRIVERRDK_S3프로그램을시작하십시오.
a.티치펜던트에서Select버튼을선택하십시오.
b.DRIVERRDK_S3 프로그램을향해아래로스크롤하십시오.
c.Enter를선택하십시오(티치펜던트의버튼).
d.Shift-Reset 및 Shift-Forward를선택하여프로그램을시작하십시오.
티치펜던트에 RUNNING 메시지가표시됩니다. 프로그램이실행되지않으면로봇옵션(PC 인터페이스 또는 사용자 소켓 메시징)이없거나올바른버전의 PC 프로그램을사용하지않았을가능성이있습니다.
RoboDK에서로봇의 IP를제공하고연결을선택하여로봇에연결합니다.