프로그램
이섹션에서는 Fanuc LS와 TP 프로그램파일의차이점과 RoboDK를사용하여 Fanuc 로봇용프로그램을자동으로컴파일하는방법에관해설명합니다.
Fanuc 로봇(TP, TPP라고도함)에서로봇프로그램을실행하려면이진파일이필요합니다. 오프라인프로그래밍소프트웨어(예 : RoboDK)로생성된 Fanuc 로봇용프로그램은 LS 형식(ASCII, 텍스트읽기및컴파일되지않음)입니다. LS 로봇프로그램을 TP 프로그램으로변환하는두가지옵션이있습니다.
1.로봇에ASCII 업로드소프트웨어옵션이있습니다. 이옵션은로봇에서이미사용가능할수있습니다. 이옵션을사용할수있는지확인하는가장좋은방법은로봇에 LS 파일을제공하는것이며 TP 파일로자동변환해야합니다. 예를들어, 파일을 FR 디스크에놓고티치펜던트에서LOAD를선택하십시오.
2.Roboguide의 WinOLPC 도구를사용하여프로그램을컴파일하십시오. 이경우 RoboDK가설치된같은컴퓨터는 Fanuc의 "maketp.exe" 컴파일러도구를사용하여 LS 프로그램을자동으로컴파일할수있습니다. 이명령에는«robot.ini»파일이필요합니다. Roboguide를설치하고작업스테이션을컴퓨터에저장한경우(“Work Cell”) WinOLPC의setrobot.exe유틸리티를사용하여이파일을생성할수있습니다.
RoboDK를사용하면 LS 프로그램이생성된직후 TP 프로그램을자동으로얻을수있습니다. RoboDK는 LS ASCII 프로그램을 TP 바이너리프로그램으로컴파일할수있도록 WinOLPC 도구를자동으로관리합니다.
LS 프로그램이생성된직후(기본포스트프로세서사용) RoboDK가따르는단계는다음과같습니다.
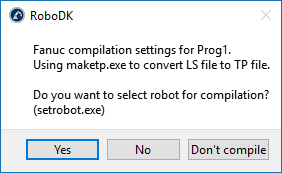
1.LS 프로그램생성후기본적으로다음화면이나타납니다. Roboguide“Work Cell”에서로봇을선택하거나프로그램을컴파일하지않아도됩니다. "No"를선택하면마지막 "robot.ini"파일이사용됩니다. "robot.ini"파일이없으면 RoboDK는자동으로 "setrobot.exe"를실행하여 "robot.ini"파일을생성합니다.
2.maketp.exe 실행파일은 TP 프로그램을생성하는데사용됩니다.
3.TP 파일또는robot.ini파일을생성할수없는경우다음과같은Robot not set메시지가나타납니다.
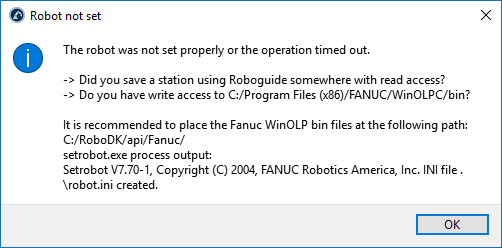
이메시지가표시되면기본 WinOLPC 폴더에대한읽기 / 쓰기액세스가제한될수있습니다. Roboguide가제대로설치되지않았거나 Roboguide에서 "Work Cell"이생성되지않았을수도있습니다.
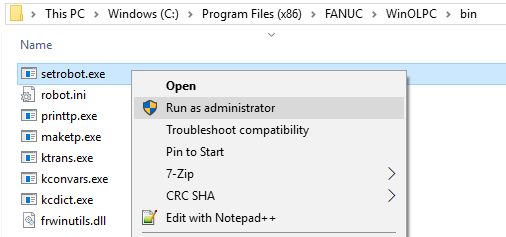
액세스권한문제를해결하는한가지방법은 setrobot.exe를관리자로수동으로실행하는것입니다.
1.Windows 탐색기를열고 WinOLPC 설치폴더로이동하십시오.
C:\Program Files (x86)\FANUC\WinOLPC\bin
2.관리자 권한으로 실행을마우스오른쪽단추로클릭하십시오.
3.로봇 Work Cell을선택합니다(Roboguide WorkCell이필요합니다).
또는다음폴더의내용을기본폴더에서복사할수있습니다.
C:\Program Files (x86)\FANUC\WinOLPC\bin
폴더로
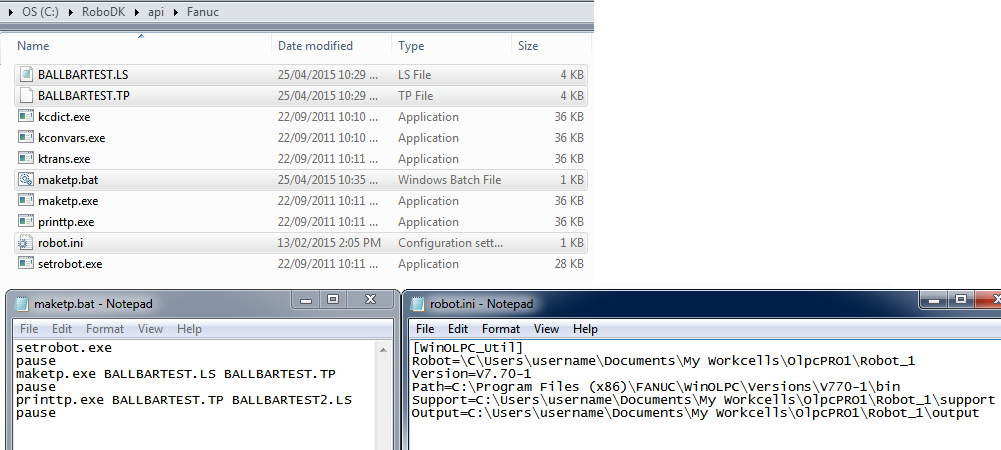
C:\RoboDK\api\Fanuc
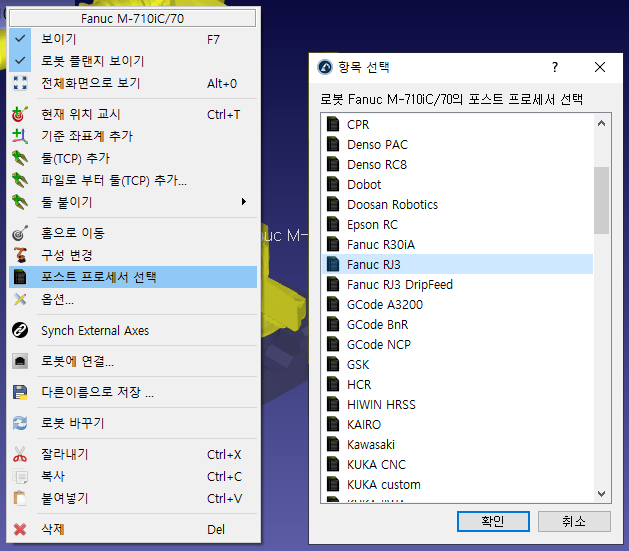
컴퓨터에서 Fanuc WinOLPC 도구를사용할수있는경우다른포스트프로세서가다르게동작하여프로그램을직접컴파일할수있습니다. 예를들어 Fanuc RJ3 컨트롤러를지원하기위해다른포스트프로세서를선택하려면다음과정을수행하십시오.
1.로봇을마우스오른쪽버튼으로클릭하십시오.
2.포스트 프로세서 선택을선택하십시오.
3.Fanuc RJ3을선택하십시오.
4.프로그램을재생성하십시오(F6).
다음그림과같이이를통해실행가능한maketp.exe가있는폴더에robot.ini파일을생성할수있습니다. 이파일은프로그램을컴파일하는데필요합니다. 또한, 프로그램을컴파일해야하는모든사용자가읽을수있는폴더에 Roboguide Work Cell을저장하는것이중요합니다.
파일이올바른폴더에배치되면다음이미지(메뉴 : 도구 ➔ 옵션 ➔ 프로그램)와같이Fanuc 로봇 설정을선택하여컴파일을테스트할수있습니다.
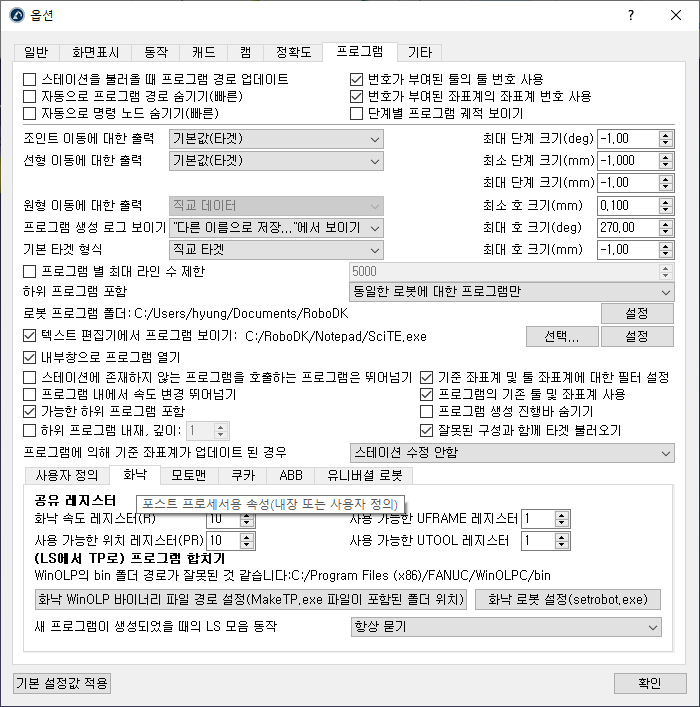
이창에서기본포스트프로세서가 Fanuc 로봇프로그램을생성하는데사용할레지스터를정의할수있습니다.
또는사용자지정포스트프로세서를사용하여이러한모든작업을보다잘사용자지정할수있습니다. Fanuc 로봇용기본 RoboDK 패키지(Fanuc_R30iA 및Fanuc_RJ3이라고함)와함께2개의맞춤형포스트프로세서가제공됩니다.
Fanuc 로봇용 RoboDK 포스트프로세서는턴테이블또는선형레일과같은외부축과동기화된6축로봇사용을지원합니다.