로봇
USB 드라이브에서프로그램을로드하려면다음단계를수행하십시오.
1.티치펜던트에 USB 드라이브를연결하십시오.
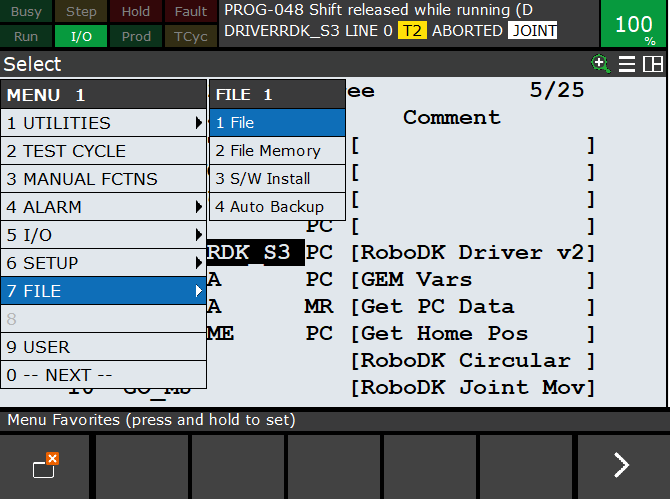
2.메뉴 ➔ 파일을선택하십시오.
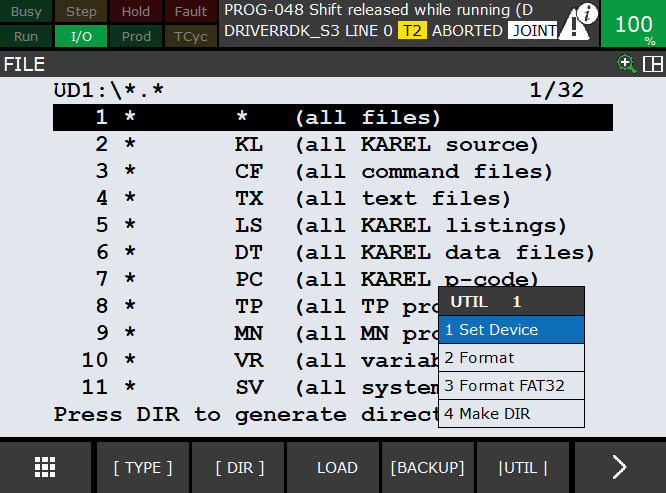
3.유틸리티 ➔ 장치 설정 ➔ USB를선택하십시오.
4.DIR을선택하십시오.
5.USB 디스크에서 TP 또는 LS 프로그램파일을선택하십시오(예: BALLBARTEST.TP).
이작업은파일을컨트롤러의 FR 메모리에자동으로저장합니다.
6.FR 메모리에서프로그램을선택하고 LOAD(화면버튼)를선택하십시오.
중요:오프라인프로그래밍에는ASCII 업로드옵션이필요합니다. 이를통해 LS 파일을컨트롤러에직접로드할수있습니다. 또는 Fanuc의 WinOLPC 도구(MakeTP)를사용하여 LS 프로그램(ASCII 파일)을 PC에서 TP 프로그램(이진파일)으로컴파일할수있습니다.
중요: RoboDK로생성된프로그램의선형속도는기본적으로레지스터 R [10]에의해정의됩니다. 프로그램에속도가설정되어있지않으면수동으로설정해야합니다. 이경우에는데이터 ➔ 타입 ➔ 레지스터, R[10]=50(for a speed of 50 mm/s)을선택하십시오.