한의 로봇
이문서에서는 RoboDK를사용하여한로봇이한컨트롤러로프로그램을전송하는일반적인동작에대한개요를설명합니다.
한스 컨트롤러로 프로그램 전송
RoboDK에서생성된로봇프로그램을수동으로Han의로봇컨트롤러로가져올수있습니다.
다음단계에따라 RoboDK 프로그램을Han의컨트롤러로가져와야합니다:
1.한의컨트롤러를실행하고로봇에연결합니다.
2.RoboDK에서가져오려는프로그램을마우스오른쪽버튼으로 클릭하고로봇 프로그램을 다음 이름으로 생성(....)을선택합니다.
3.RoboDK는두개의파일을저장하라는메시지를표시하는데, 하나는컨트롤러로전송할명령의줄별스크립트이고다른하나는컨트롤러에업로드할 .json 파일입니다.
4.각파일을저장할위치를선택하면.json 파일을USB 디스크에저장하여프로그램으로컨트롤러로가져올수있습니다.
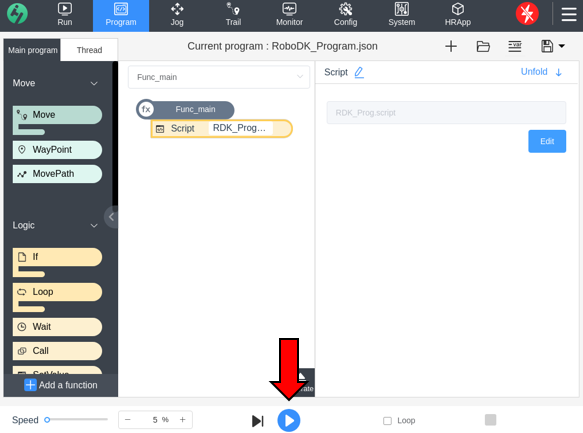
5.컨트롤러에서프로그램탭으로이동합니다.
6.'현재프로그램' 이름오른쪽에는폴더아이콘이있습니다. 이아이콘을선택하면프로그램파일목록이열립니다.
7.목록하단의 '가져오기' 버튼을선택합니다.
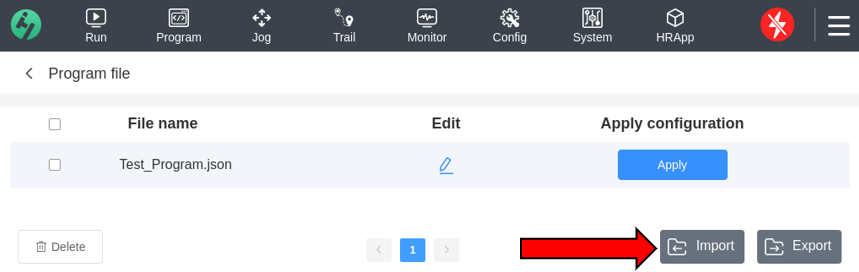
8.USB에서 RoboDK가생성한 .json 파일을찾아선택합니다.
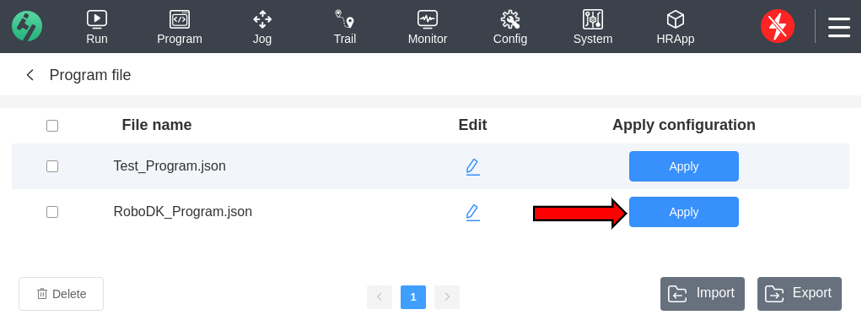
9.'적용'을클릭하여가져온프로그램을활성프로그램으로설정합니다.
10.RoboDK 프로그램은스크립트를호출하는함수로가져옵니다.
11.로봇에서프로그램실행을시작하려면파란색시작버튼을선택합니다.