한화 로봇
RoboDK는모든한화로봇컨트롤러를지원합니다. 한화에대한시뮬레이션과로봇프로그램을만들수있으며, 드라이버를사용하여실제한화로봇을 RoboDK에서움직일수도있습니다.
한화
로봇드라이버는오프라인프로그래밍의대안을제공합니다. 한화드라이버를사용하면프로그램(온라인프로그래밍)을시뮬레이션할때 RoboDK에서직접로봇을움직일수있습니다. 자세한내용은 로봇 드라이버 섹션에서확인할수있습니다.
아래단계에따라한화로봇과함께작동하도록 RoboDK를구성하세요.
1단계. 로봇 IP 주소 설정
1.관리자로로그인
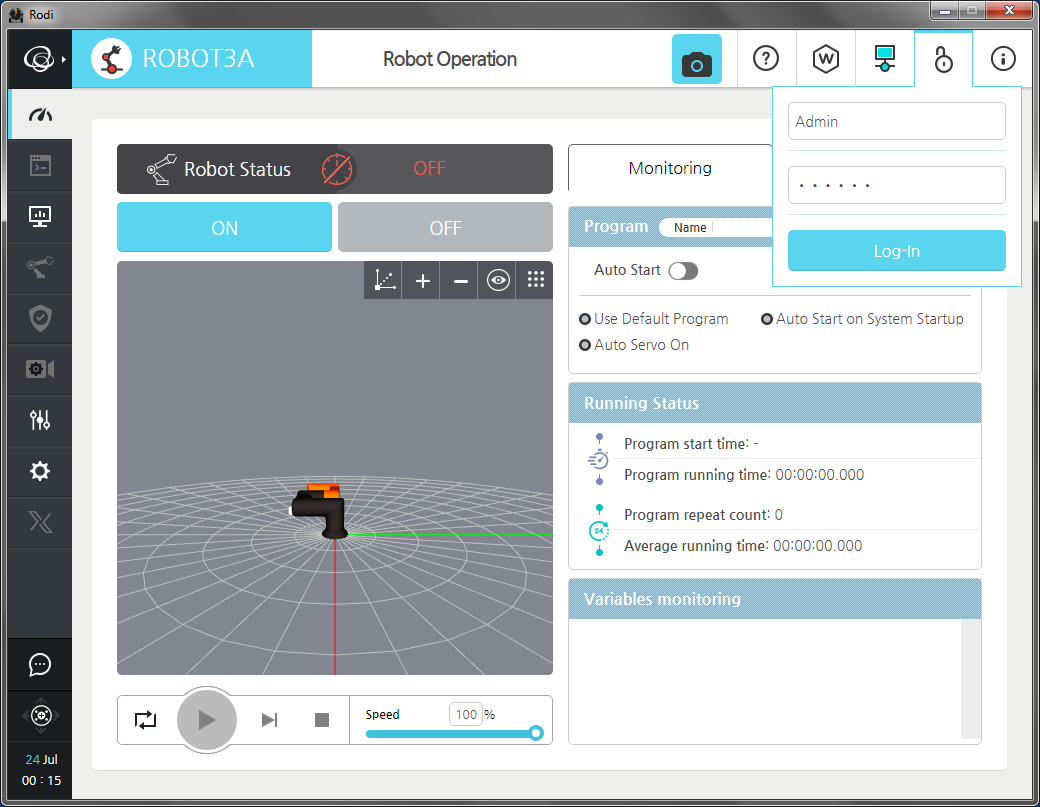
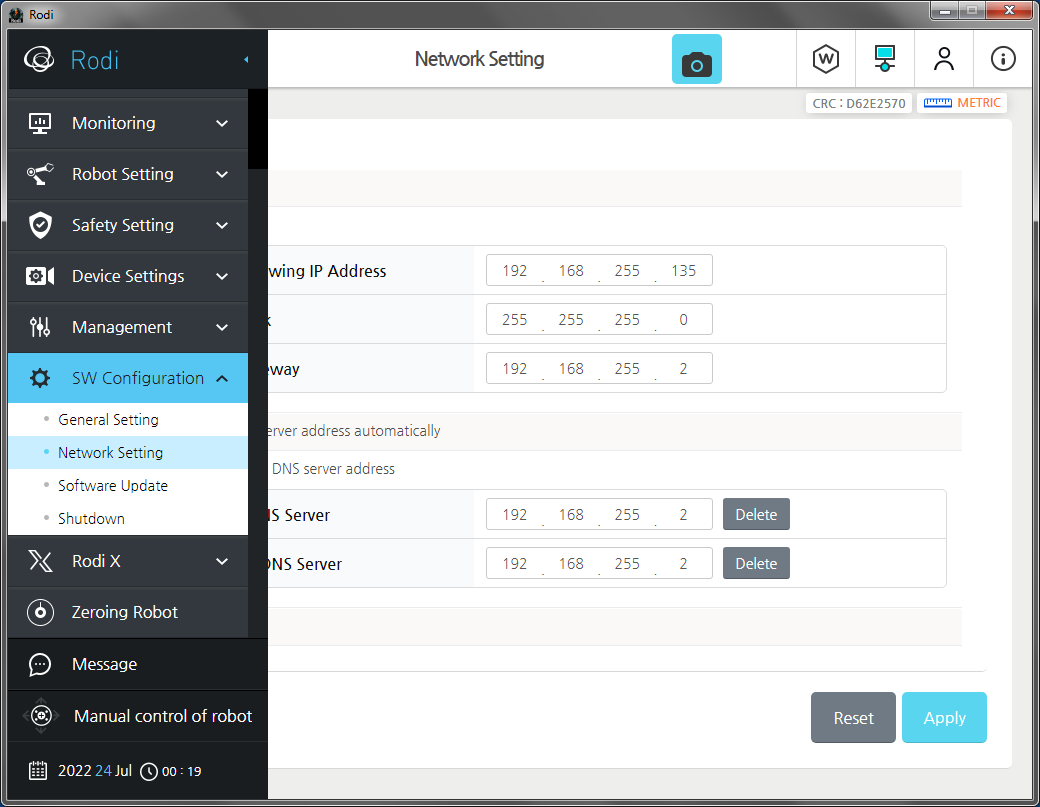
2.SW 구성⇒ 네트워크 설정을 열고로컬네트워크의매개변수, 특히 IP 주소와서브넷마스크를입력합니다. 적용을 클릭하고시스템에서재부팅을요청하면재부팅에동의합니다.
2단계. RoboDK 커넥터 플러그인 설치하기
1.관리자로로그인
2.RoboDK.asar 파일이들어있는 USB 플래시드라이브를준비하여로봇컨트롤러또는티칭펜던트에꽂습니다.
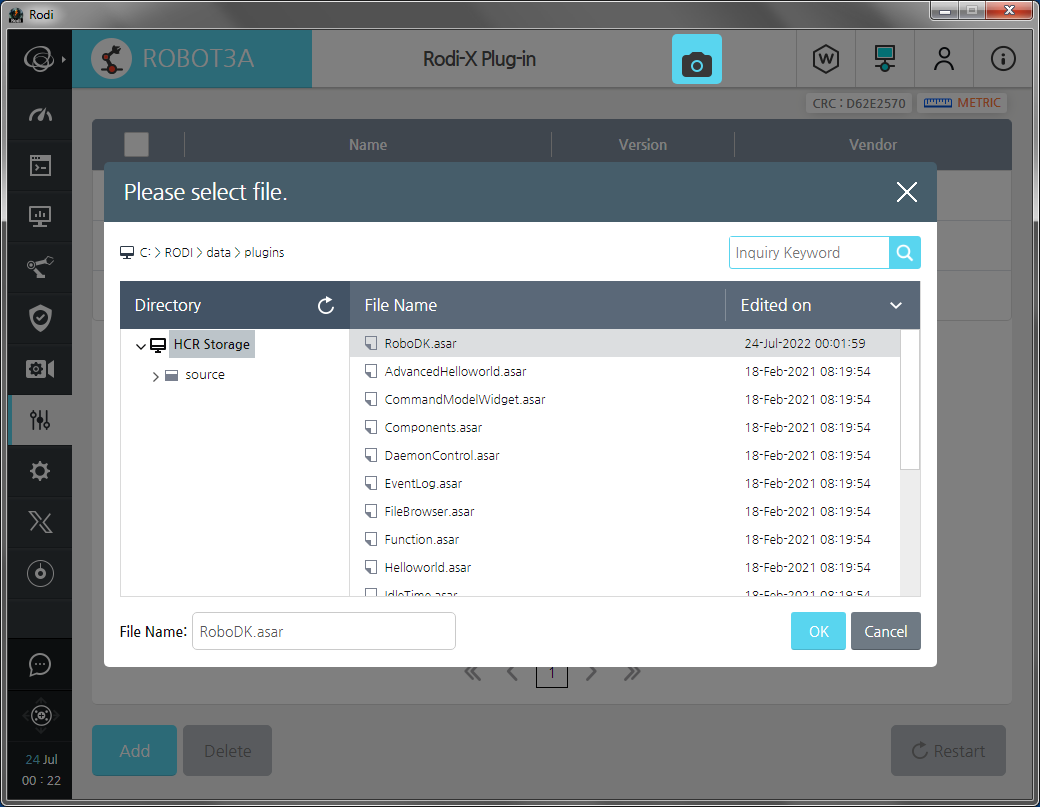
3.관리⇒ Rodi-X plug-in을 열고추가 버튼을클릭하여파일 선택 대화상자를엽니다.
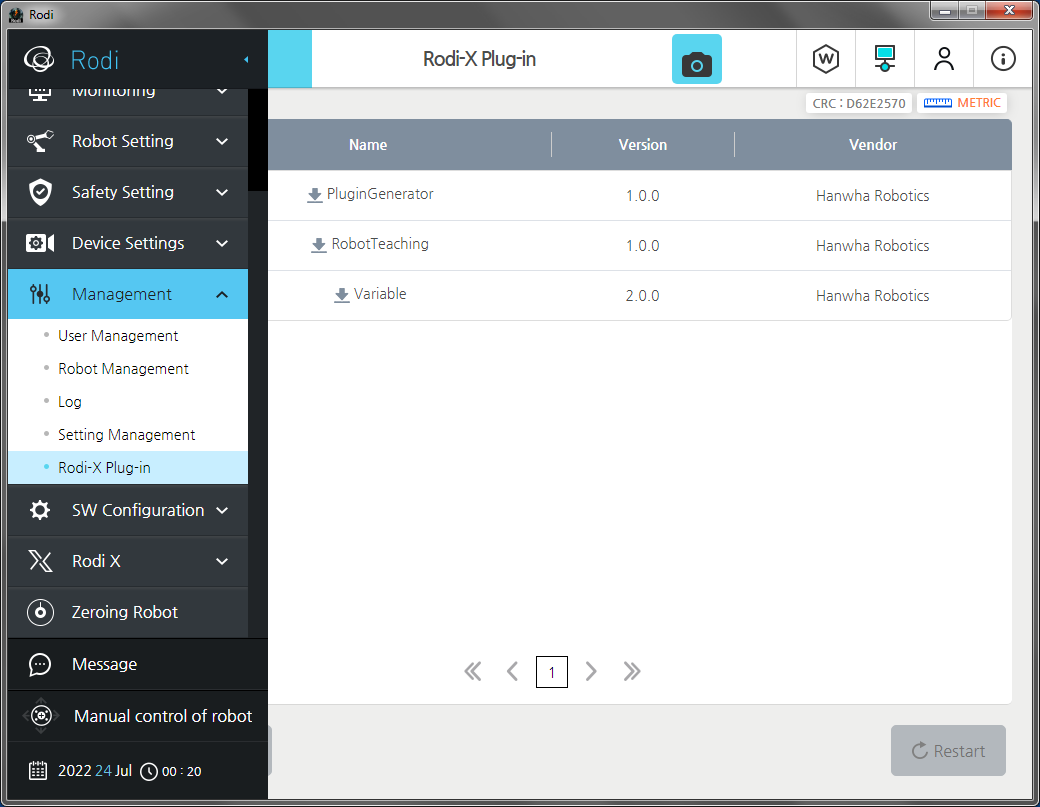
4.RoboDK.asar를 선택하고확인을 클릭합니다.
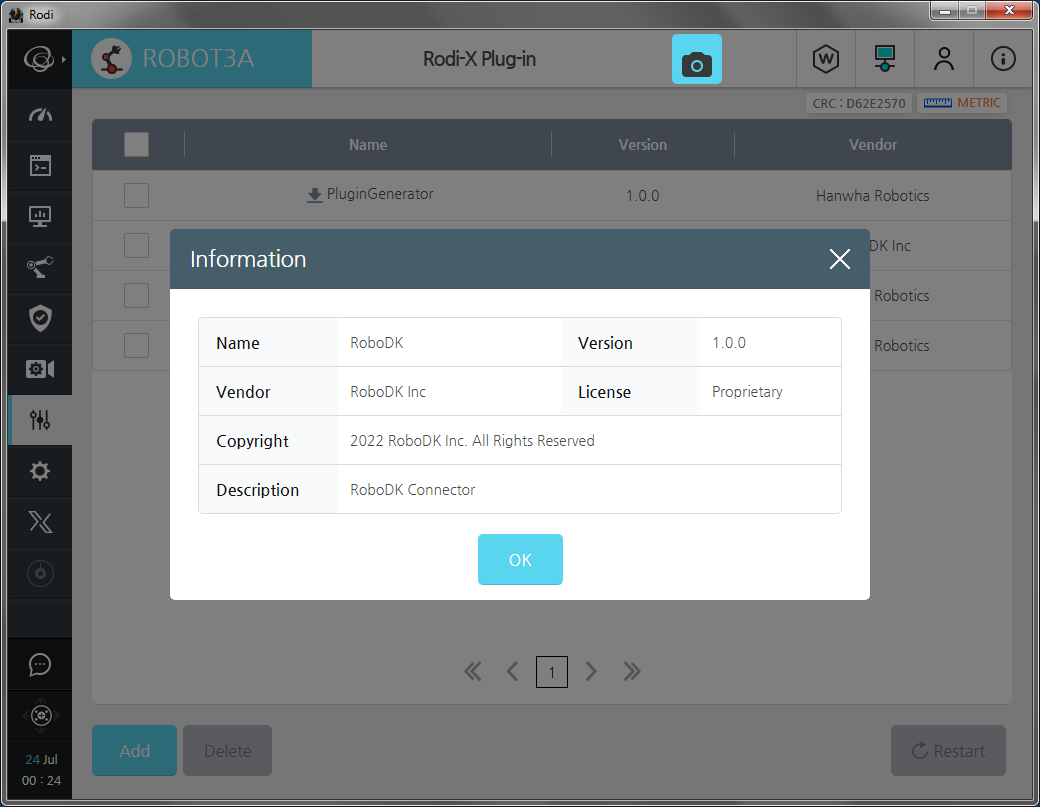
5.다시 시작 버튼을누릅니다.
6.다시로드하면플러그인에대한정보를볼수있습니다.
7.Rodi X⇒ RoboDK를 열고서버 상태 필드에오류메시지가없는지확인합니다. TCP 7000 포트가다른애플리케이션에의해점유되고있는것으로보이는경우통신 포트 필드에다른값을입력하고적용을 클릭하여변경할수있습니다.
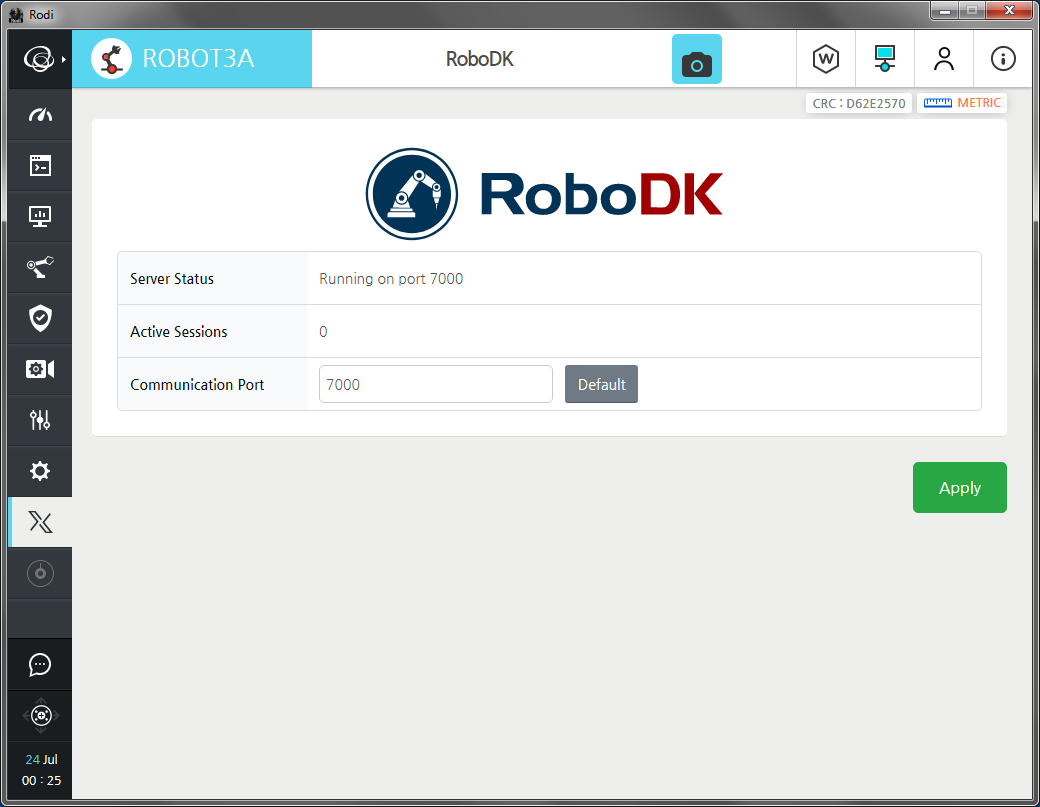
8.이제로봇을원격으로제어할준비가되었습니다.
3단계. RoboDK 연결 설정하기
1.RoboDK 프로젝트를설정하고그안에한화로봇중하나를배치합니다. 예를들어, HCR-3.
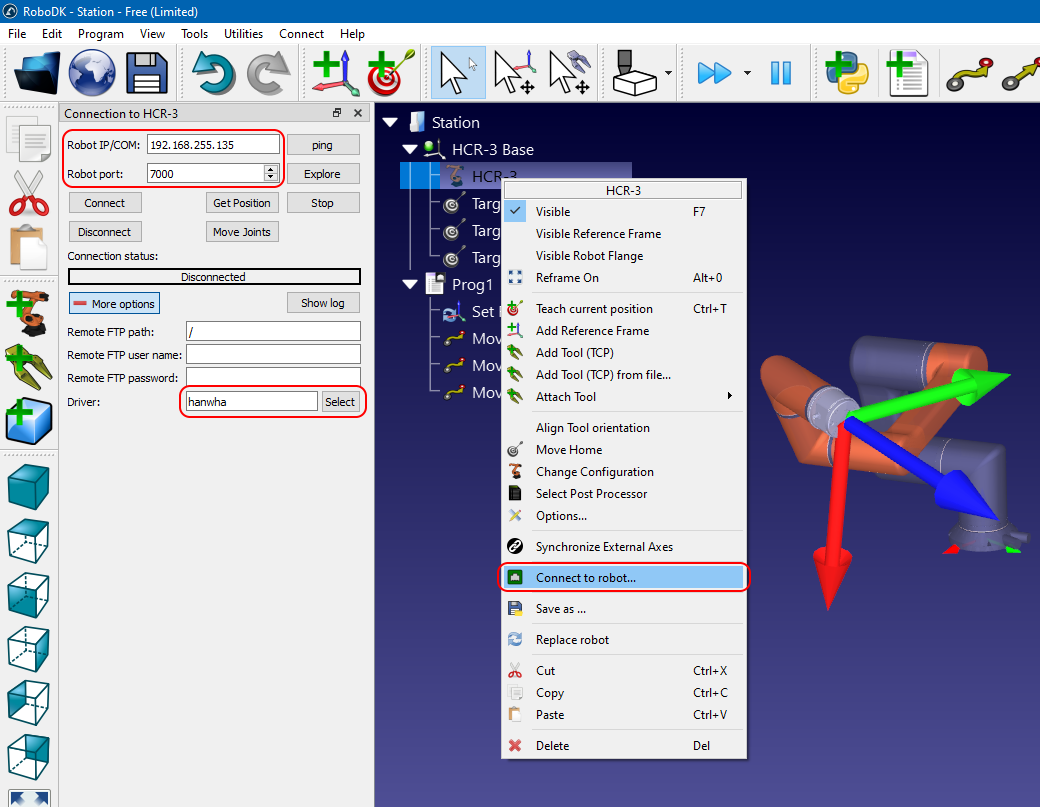
2.프로젝트트리에서로봇을마우스오른쪽버튼으로클릭하고로봇에 연결...을 선택합니다.
3.HCR-3에 연결 창에서로봇 IP/COM 및로봇 포트 필드를입력합니다(로봇의 IP 주소와 RoboDK plug-in의포트번호사용).
4.같은창에서추가 옵션 버튼을클릭하고드라이버 필드에한화를 입력합니다(또는선택 버튼을사용하여목록에서적절한드라이버를선택합니다).
5.연결 버튼을클릭하고모든설정이올바르면연결 상태 표시줄에준비됨이 표시됩니다.