JAKA
RoboDK를사용하여연결된 PC에서로봇을자동으로움직이도록 RoboDK와 JAKA 로봇을연결할수있습니다. 이를통해온라인프로그래밍및디버깅을위해로봇에서 RoboDK 실행 옵션을사용할수있습니다. 연결은표준이더넷연결(TCP/IP)을통해설정할수있습니다.
중요: JAKA 드라이버를사용하려면컴퓨터에 Visual Studio 2013용 Visual C++ 재배포가능패키지가설치되어있어야합니다. Microsoft에서다운로드하여설치할수있습니다.
다음단계에따라 JAKA 온라인프로그래밍을위한 RoboDK 드라이버를설정하세요:
1.JAKA Zu 앱을실행하고 JAKA Zu 앱에서로봇에연결합니다.
2.JAKA Zu 로봇의전원을켜고활성화합니다.
3.RoboDK 툴바에서연결➔로봇연결을선택합니다.
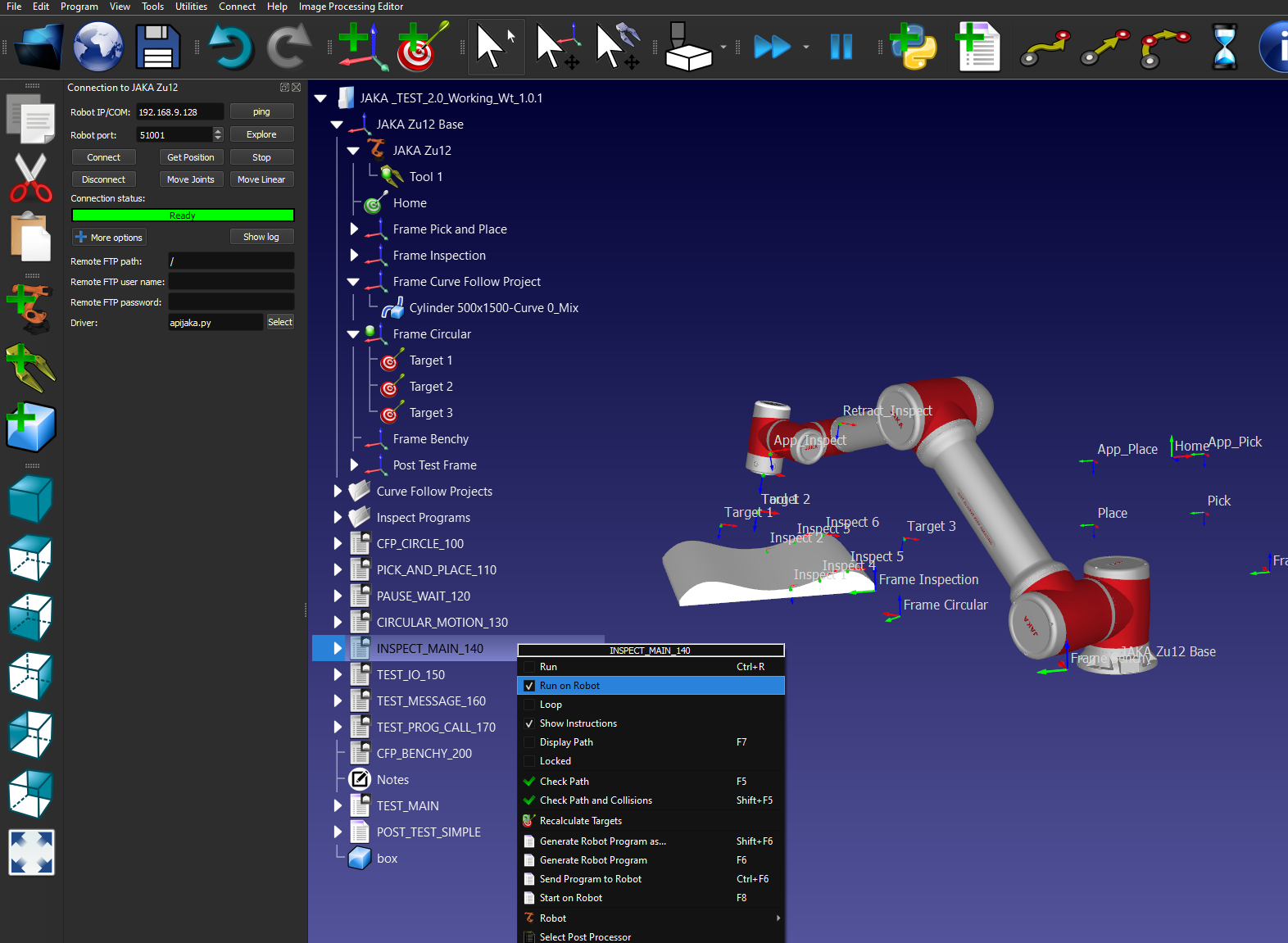
4.'추가옵션'에서JAKA 드라이버(apijaka.py)를선택합니다.
5.로봇 IP와포트를사용하여 RoboDK에서로봇을연결합니다.
6.이제 RoboDK에서직접 JAKA 로봇을이동할수있습니다.
a.RoboDK에서로봇을대상으로이동하려면스테이션트리에서대상을더블클릭하고연결인터페이스에서'조인트이동' 또는 '선형이동' 버튼을선택하여대상에조인트또는선형이동을실행합니다.
b.드라이버를사용하여로봇에서프로그램을실행하려면원하는프로그램을마우스오른쪽버튼으로클릭하고 '로봇에서실행' 옵션을선택합니다. 그런다음프로그램을두번클릭하여로봇에서실행합니다.