RoboDK
로봇드라이버는오프라인프로그래밍(프로그램을생성한다음로봇에전송하여실행하는방식)의대안을제공합니다. RoboDK에서로봇에서직접시뮬레이션을실행할수있습니다(온라인프로그래밍). 드라이버에대한자세한내용은 로봇 드라이버 섹션에서확인할수있습니다.
RoboDK에서로봇에연결하려면다음단계를따르세요:
1.RoboDK에서로봇을마우스오른쪽버튼으로클릭합니다.
2.선택: 
3.로봇의 IP를입력합니다.
4.연결을 선택합니다.
연결에성공하면준비됨이라는 녹색메시지가표시되어야합니다. 그렇지않은경우 IP, 사용자아이디및비밀번호가올바른지확인하세요. 또한이전섹션에서설명한대로 RoboDK의 IP 주소형식(127.0.0.1/username@password)을올바르게입력했는지확인하세요.
로봇은연결메뉴에서로봇조인트가져오기를 선택하고로봇을조그한다음조인트 클릭하여로봇을이동할수있습니다.
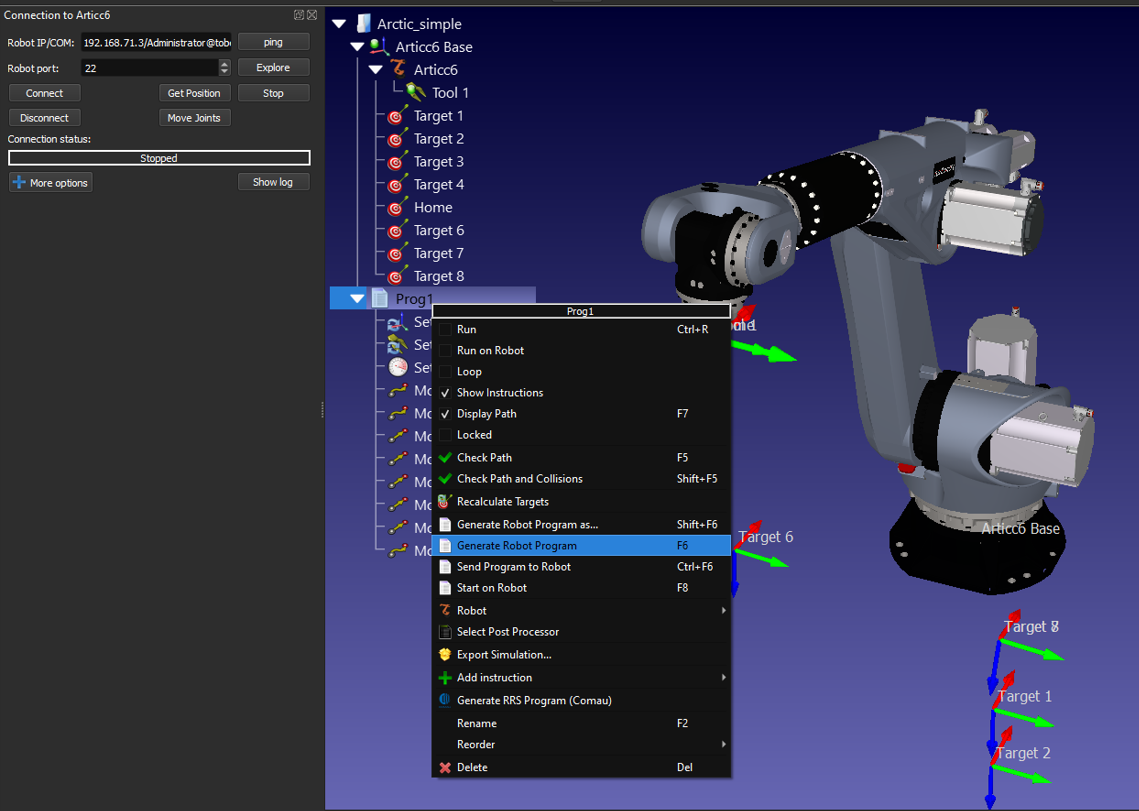
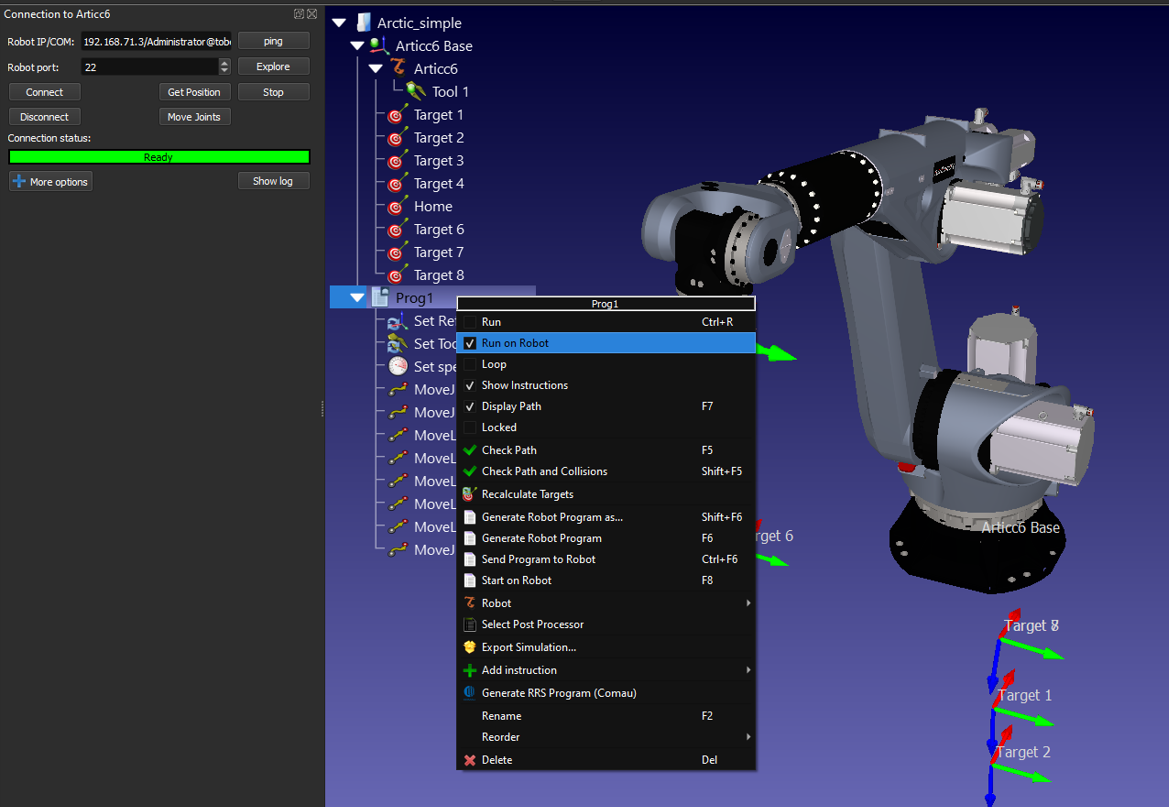
PC에서로봇으로직접프로그램을실행하려면프로그램에서로봇에서 실행 옵션을활성화해야합니다. 다음단계에서는로봇에서실행옵션을활성화하는방법을설명합니다:
a.프로그램을마우스오른쪽버튼으로클릭합니다(이예제에서는 Print3D).
b.로봇에서 실행을 선택합니다.
c.프로그램을더블클릭하여시작(또는마우스오른쪽버튼을클릭하고실행선택)
이로봇프로그래밍방법은디버깅목적으로는유용하지만로봇프로그램을배포하려면이전섹션에서언급한대로오프라인으로프로그램을생성하는것이좋습니다.
로봇에서 실행 옵션을선택하면프로그램을더블클릭할때마다실제로봇에연결됩니다(또는마우스오른쪽버튼을클릭한다음실행을 선택).
이러한작업은 RoboDK API에서도 사용할수있으며로봇프로그래밍을다른애플리케이션과통합할수있습니다. 이 API는 Python, C# 및기타프로그래밍언어로제공됩니다.