KEBA
RoboDK 시뮬레이션이준비되면오프라인에서 KEBA 로봇컨트롤러에서실행할수있는프로그램(KAIRO 파일)을생성할수있습니다.
로봇시뮬레이션에서컨트롤러용프로그램(KAIRO 파일)을생성하려면다음단계를따르세요:
1.프로그램을마우스오른쪽버튼으로클릭합니다.
2.로봇 프로그램 생성 F6을 선택합니다. 그런다음FTP를통해파일을원하는프로젝트로수동으로전송합니다.
또는SFTP를설정한후로봇 프로그램 생성 Ctrl+F6을 선택합니다.
3.티치펜던트의프로젝트탭에서새로고침을누릅니다.
4.프로그램을로드한다음메인파일을로드합니다.

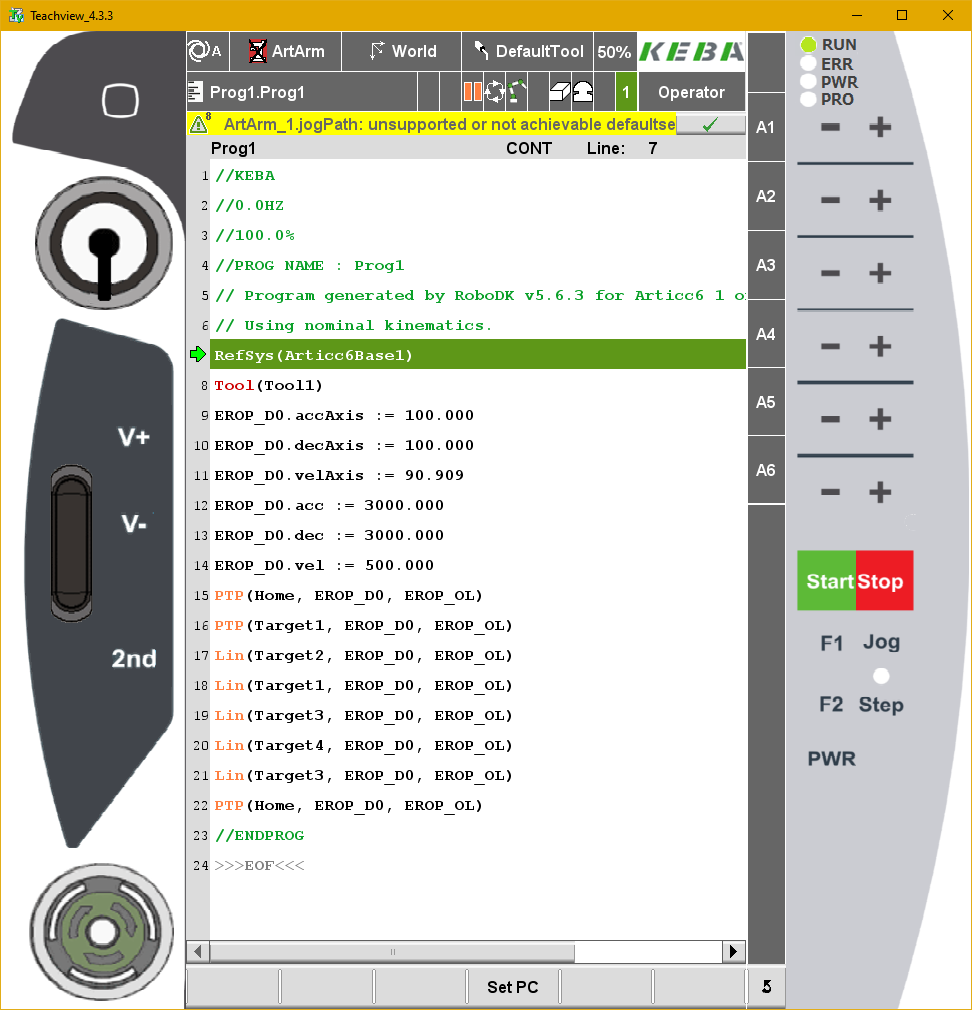
프로그램이텍스트편집기에표시됩니다. RoboDK에서프로그램을생성하는방법에대한자세한내용은 문서의 로봇 프로그램 섹션에서 확인할수있습니다.
팁: 다양한 포스트 프로세서 중에서선택하거나포스트프로세서를사용자지정하여프로그램생성방식(예: 그리퍼또는외부센서지원)을정의할수있습니다.