KEBA 컨트롤러
두가지방법을사용하여 RoboDK에서 KEBA 컨트롤러를프로그래밍할수있습니다: 오프라인으로로봇프로그램을생성하는방법: KEBA KAIRO 포스트프로세서를사용하거나 RoboDK 드라이버를사용하여로봇프로그램을생성할수있습니다.
KEBA KAIRO 포스트프로세서를사용하면 RoboDK를사용하여 KEBA 컨트롤러에로드할수있는 KAIRO 파일을얻을수있습니다. 이작업은 KEBA 로봇에사용되는기본포스트프로세서를사용하여수행됩니다. 또한 FTP 또는 USB 드라이브를사용하여스크립트프로그램파일을직접전송할수도있습니다.
또한로봇이컴퓨터에연결되어있는경우 KEBA 로봇용드라이버를사용하면 RoboDK에서로봇의프로그램을실행할수있습니다.
KEBA 컨트롤러 IP 검색
RoboDK에서프로그램을자동으로전송하거나실행하려면 KEBA 컨트롤러의 IP가필요합니다. 브라우저에 IP를입력하여웹인터페이스에액세스하면로봇의 IP가올바른지확인할수있습니다
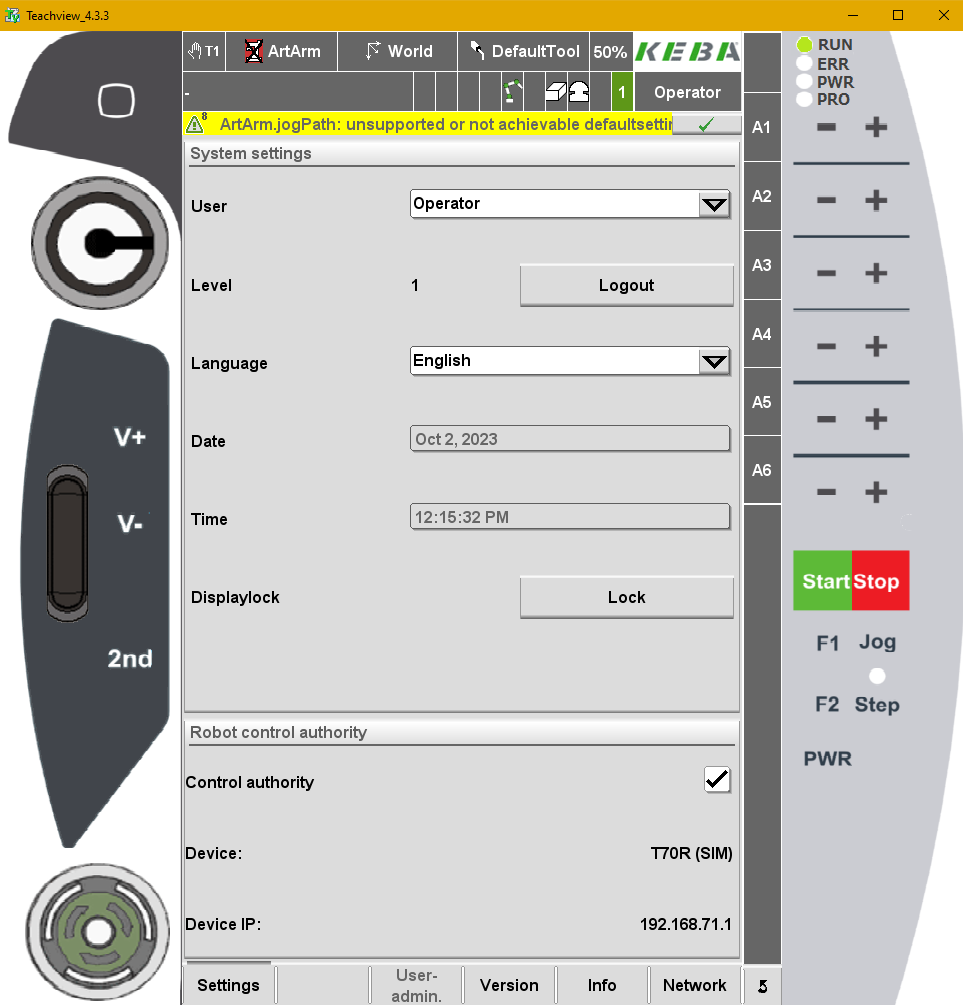
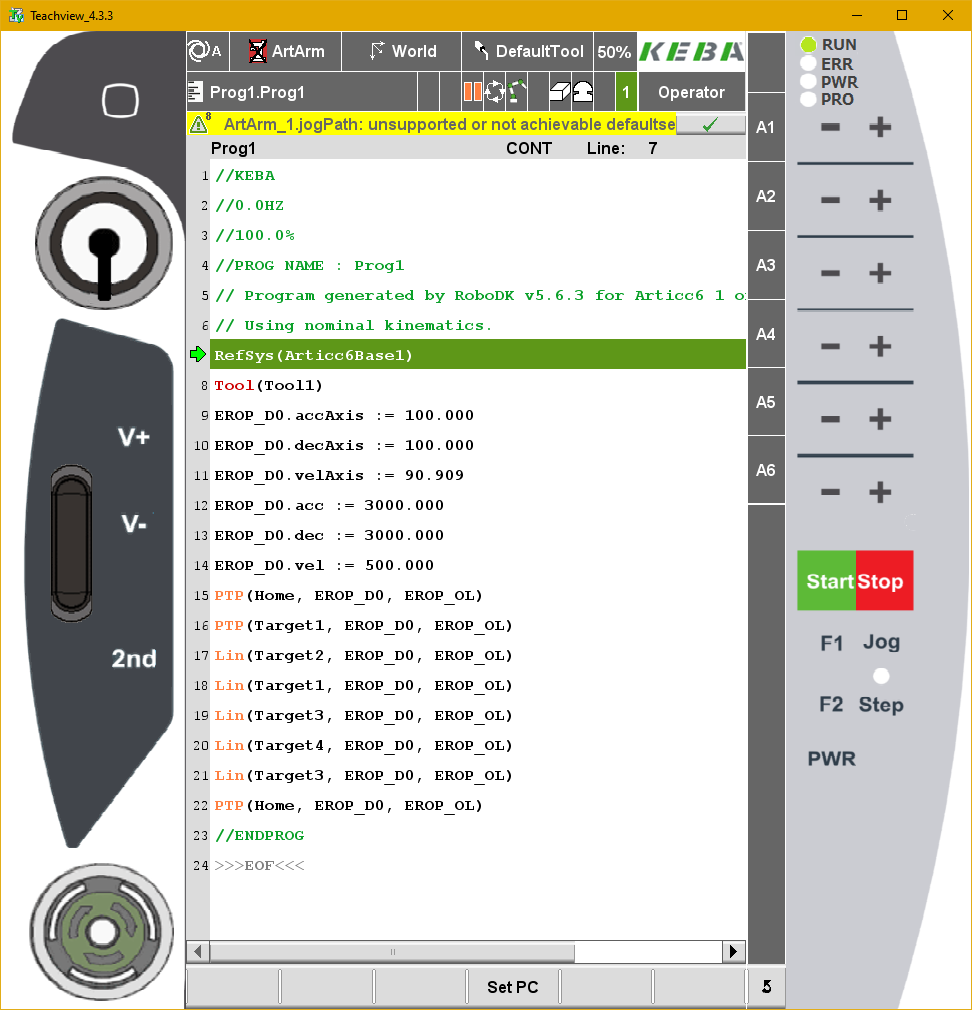
IP를얻으려면티치펜던트의서비스창으로이동한다음정보탭을선택하면됩니다.
RoboDK에입력한 IP 주소의형식은사용자이름과비밀번호를포함해야하며다음형식을따라야합니다: .127.0.0.1/username@password
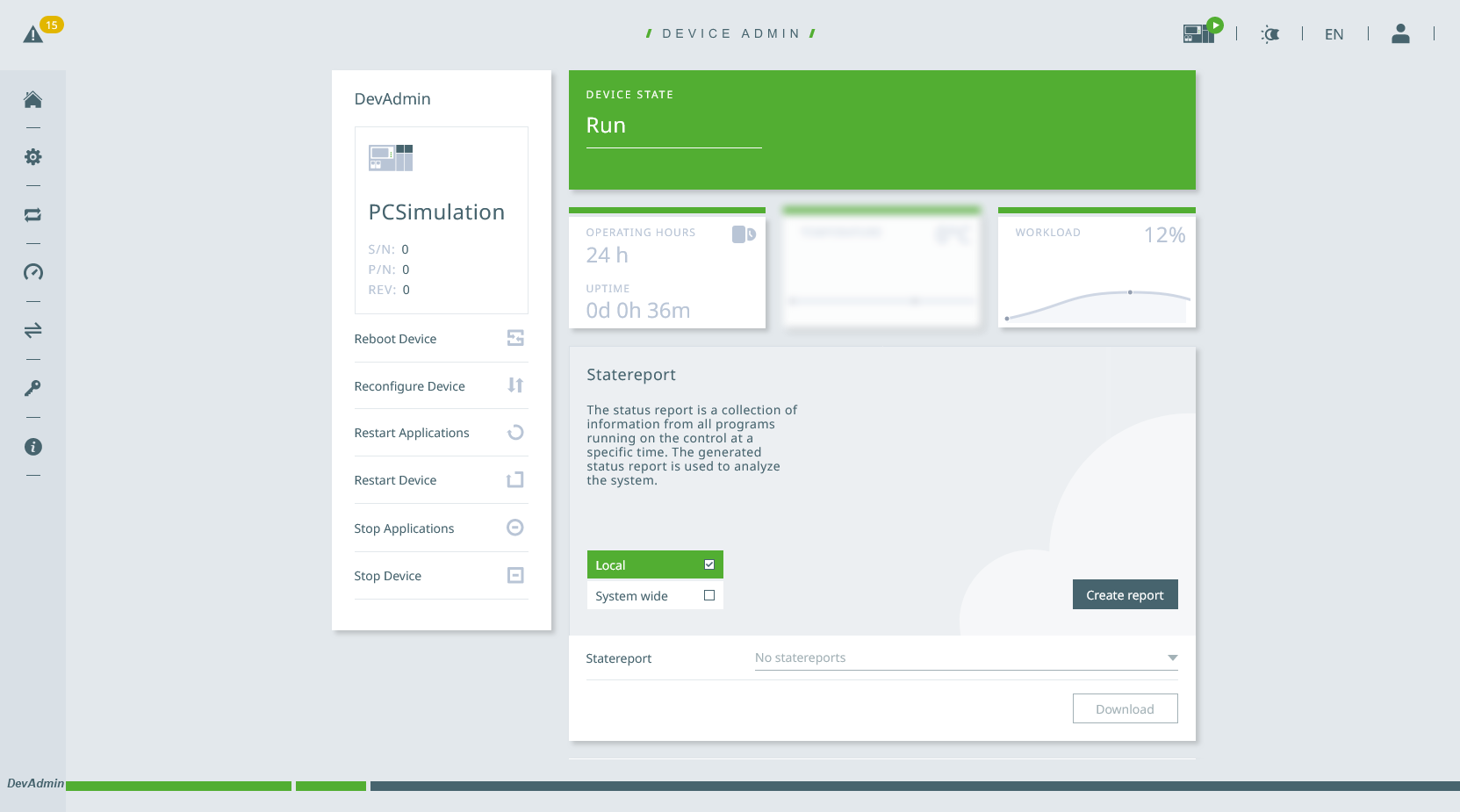
다음이미지는컨트롤러티치펜던트에서컨트롤러 IP를검색하는방법을보여줍니다.


다음이미지와같이로봇웹인터페이스가표시되지않는경우네트워크연결을올바르게설정했는지확인하세요.
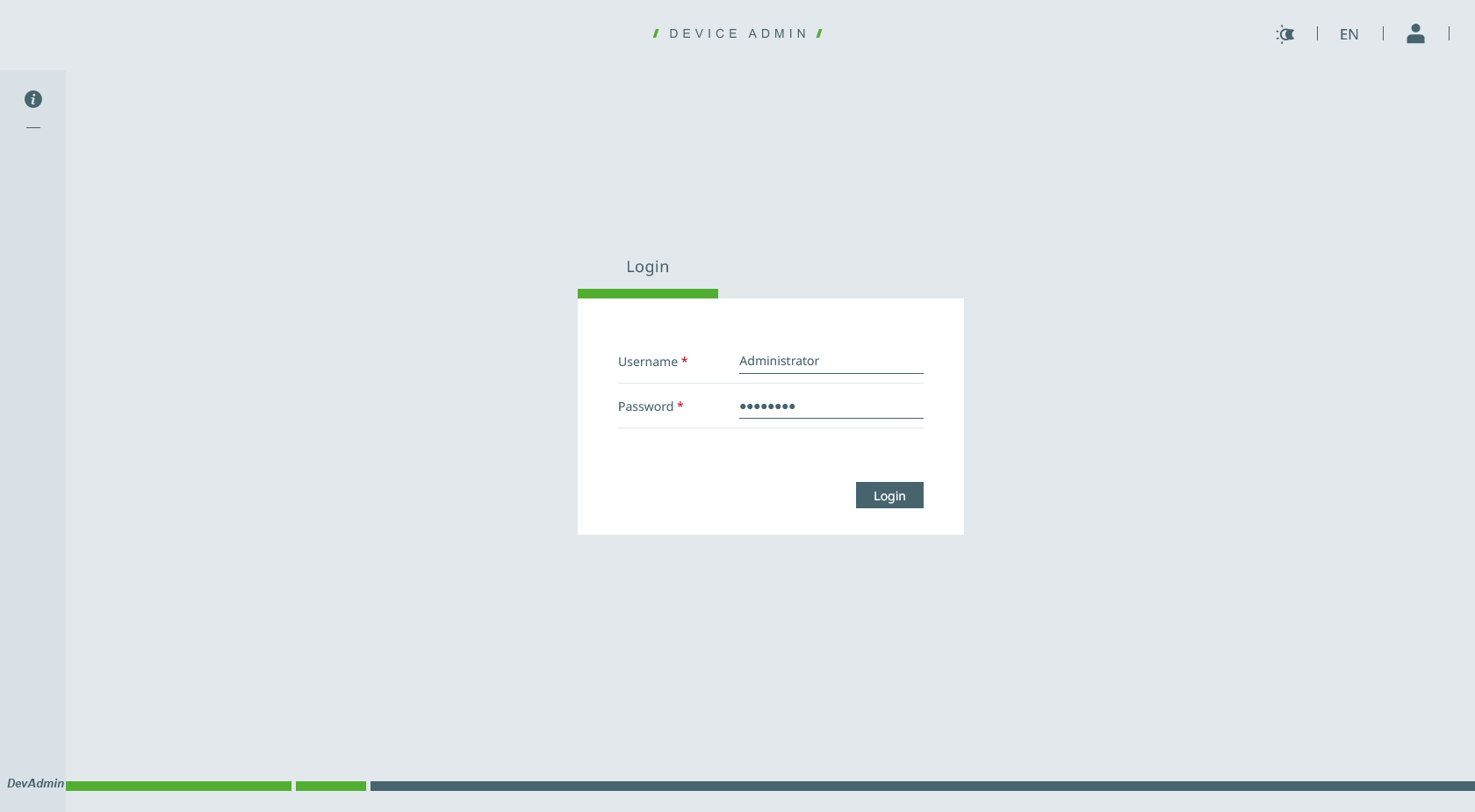
또한로봇의웹인터페이스에로그인하는데사용되는사용자아이디와비밀번호가필요하며, 웹인터페이스를통해로그인하여유효한지테스트할수있습니다.
KEBA 컨트롤러에서 프로그램 실행
RoboDK 시뮬레이션이준비되면오프라인에서 KEBA 로봇컨트롤러에서실행할수있는프로그램(KAIRO 파일)을생성할수있습니다.
로봇시뮬레이션에서컨트롤러용프로그램(KAIRO 파일)을생성하려면다음단계를따르세요:
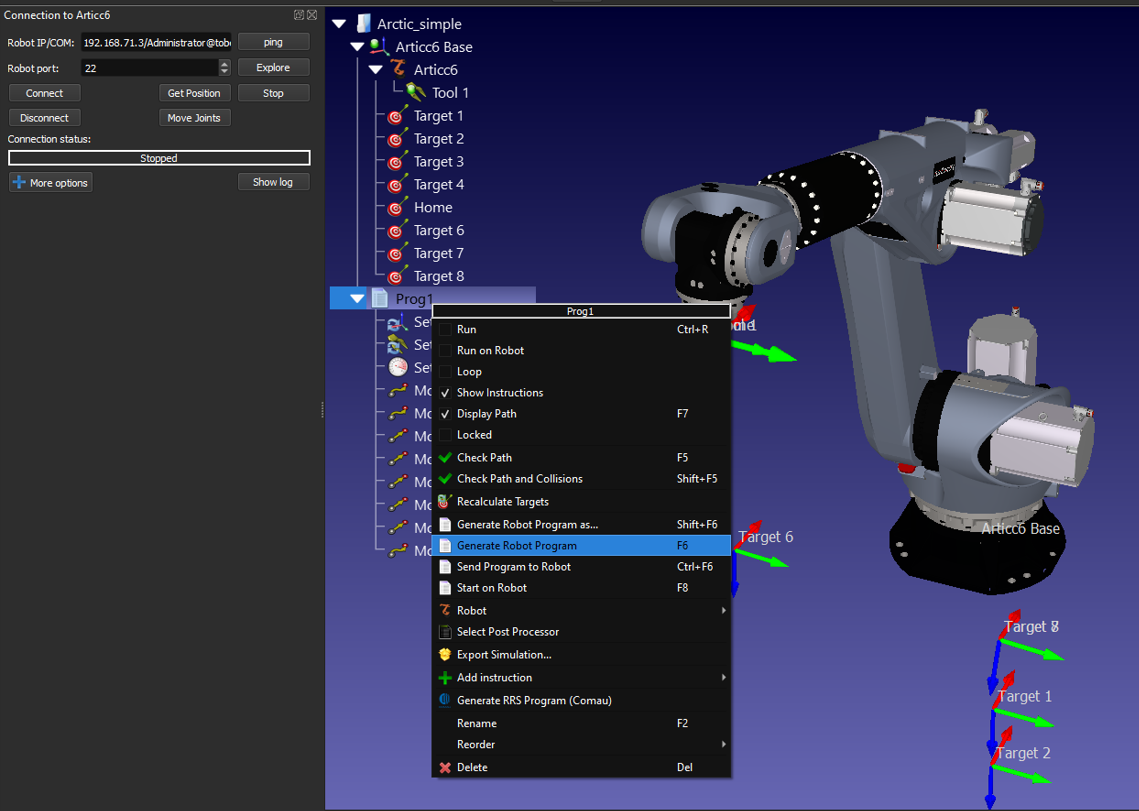
1.프로그램을마우스오른쪽버튼으로클릭합니다.
2.로봇 프로그램 생성 F6을 선택합니다. 그런다음FTP를통해파일을원하는프로젝트로수동으로전송합니다.
또는SFTP를설정한후로봇 프로그램 생성 Ctrl+F6을 선택합니다.
3.티치펜던트의프로젝트탭에서새로고침을누릅니다.
4.프로그램을로드한다음메인파일을로드합니다.

프로그램이텍스트편집기에표시됩니다. RoboDK에서프로그램을생성하는방법에대한자세한내용은 문서의 로봇 프로그램 섹션에서 확인할수있습니다.
RoboDK
로봇드라이버는오프라인프로그래밍(프로그램을생성한다음로봇에전송하여실행하는방식)의대안을제공합니다. RoboDK에서로봇에서직접시뮬레이션을실행할수있습니다(온라인프로그래밍). 드라이버에대한자세한내용은 로봇 드라이버 섹션에서확인할수있습니다.
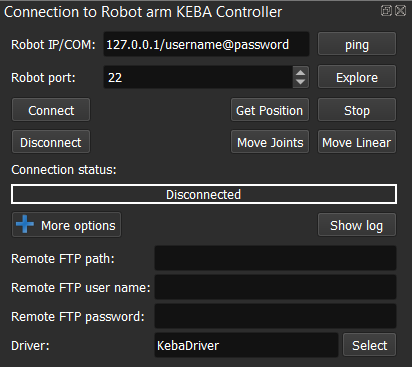
RoboDK에서로봇에연결하려면다음단계를따르세요:
1.RoboDK에서로봇을마우스오른쪽버튼으로클릭합니다.
2.선택: 
3.로봇의 IP를입력합니다.
4.연결을 선택합니다.
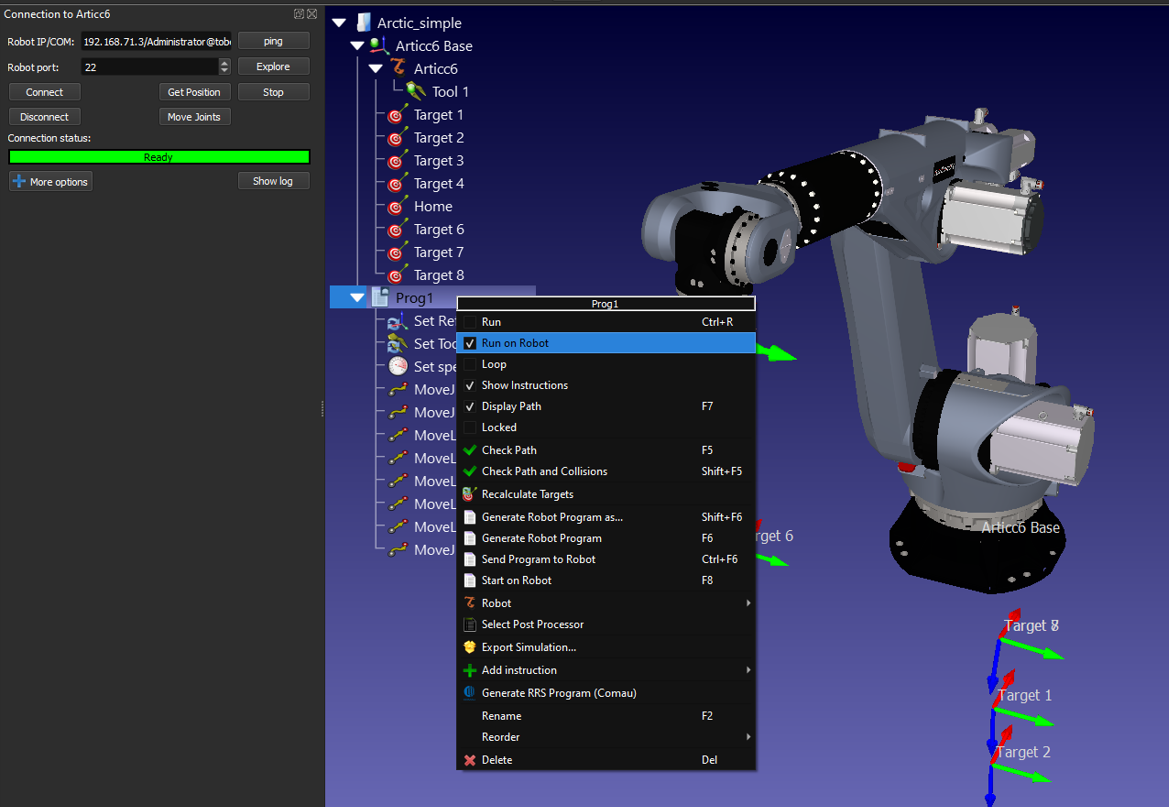
연결에성공하면준비됨이라는 녹색메시지가표시되어야합니다. 그렇지않은경우 IP, 사용자아이디및비밀번호가올바른지확인하세요. 또한이전섹션에서설명한대로 RoboDK의 IP 주소형식(127.0.0.1/username@password)을올바르게입력했는지확인하세요.
로봇은연결메뉴에서로봇조인트가져오기를 선택하고로봇을조그한다음조인트 클릭하여로봇을이동할수있습니다.
PC에서로봇으로직접프로그램을실행하려면프로그램에서로봇에서 실행 옵션을활성화해야합니다. 다음단계에서는로봇에서실행옵션을활성화하는방법을설명합니다:
a.프로그램을마우스오른쪽버튼으로클릭합니다(이예제에서는 Print3D).
b.로봇에서 실행을 선택합니다.
c.프로그램을더블클릭하여시작(또는마우스오른쪽버튼을클릭하고실행선택)
이로봇프로그래밍방법은디버깅목적으로는유용하지만로봇프로그램을배포하려면이전섹션에서언급한대로오프라인으로프로그램을생성하는것이좋습니다.
로봇에서 실행 옵션을선택하면프로그램을더블클릭할때마다실제로봇에연결됩니다(또는마우스오른쪽버튼을클릭한다음실행을 선택).
이러한작업은 RoboDK API에서도 사용할수있으며로봇프로그래밍을다른애플리케이션과통합할수있습니다. 이 API는 Python, C# 및기타프로그래밍언어로제공됩니다.
SFTP에 PPK 파일 사용
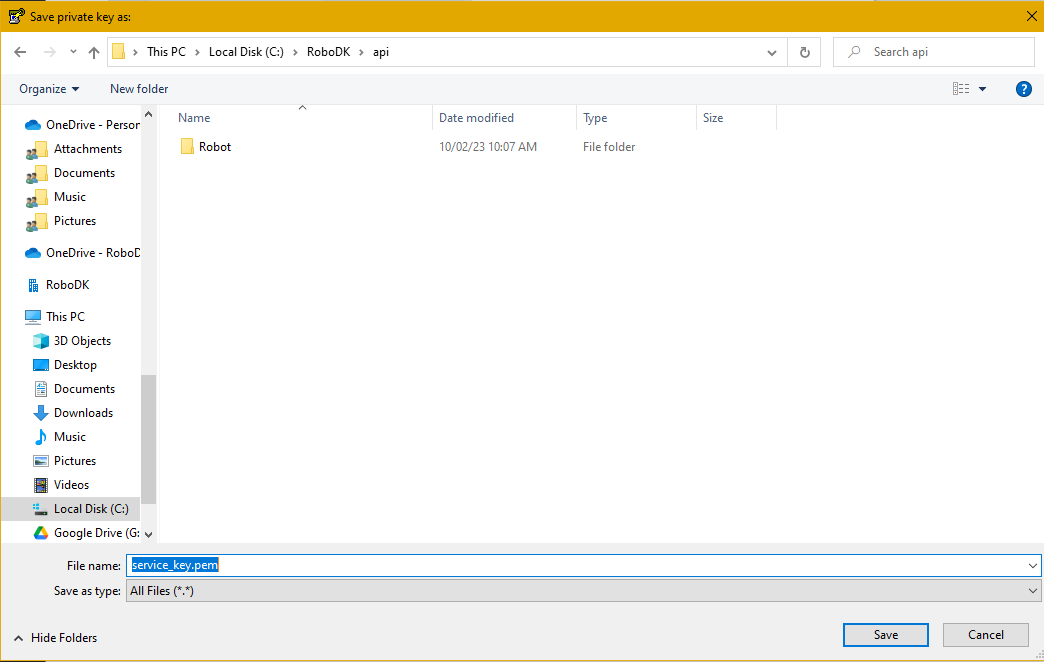
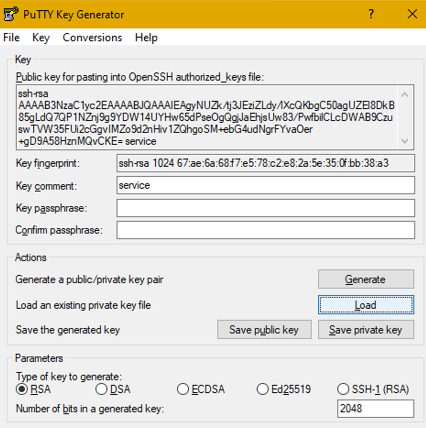
사용자아이디와비밀번호를사용하여파일을전송하는대신키파일을사용할수도있습니다. 이렇게하려면로봇과함께제공된 KEBA 제공 PPK 파일을 PEM 파일로변환해야합니다. 이작업은퍼티와함께설치되는유틸리티인 puttygen을사용하여수행할수있습니다.
puttygen에서로드를선택하여키파일을로드합니다. 그런다음변환드롭다운을클릭하고열린 SSH 키내보내기(새파일형식강제적용)를선택합니다.
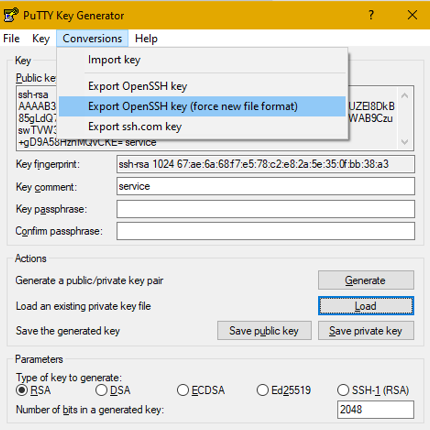
서비스키의이름을 service_key.pem으로지정하고기본적으로C:\RoboDK\api에있는RoboDK API 폴더에파일을저장합니다.