Mecademic
RoboDK 시뮬레이션이준비되면 Mecademic 로봇컨트롤러에서실행할수있는프로그램(스크립트파일)을오프라인으로생성할수있습니다. 원격컴퓨터에서로봇컨트롤러에서프로그램을실행할 PY 파일을생성할수도있습니다.
로봇시뮬레이션에서오프라인프로그램(스크립트또는 PY 파일)을생성하려면다음단계를따르세요:
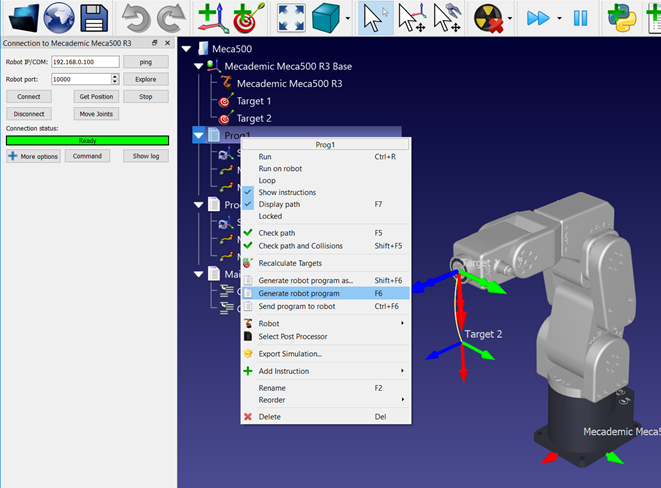
1.프로그램(이예에서는Prog1)을마우스오른쪽버튼으로클릭합니다.
2.로봇 프로그램 생성 F6을 선택합니다.
프로그램이텍스트편집기에표시됩니다(이동작은메뉴에서변경할수있습니다: 도구➔ 옵션➔ 프로그램).
스크립트 파일을 로드하는 방법
프로그램/스크립트파일을받으면웹인터페이스를사용하여프로그램을실행하거나컨트롤러에로드할수있습니다. Mecademic 웹인터페이스를사용하여프로그램을실행하려면다음단계를따르세요:
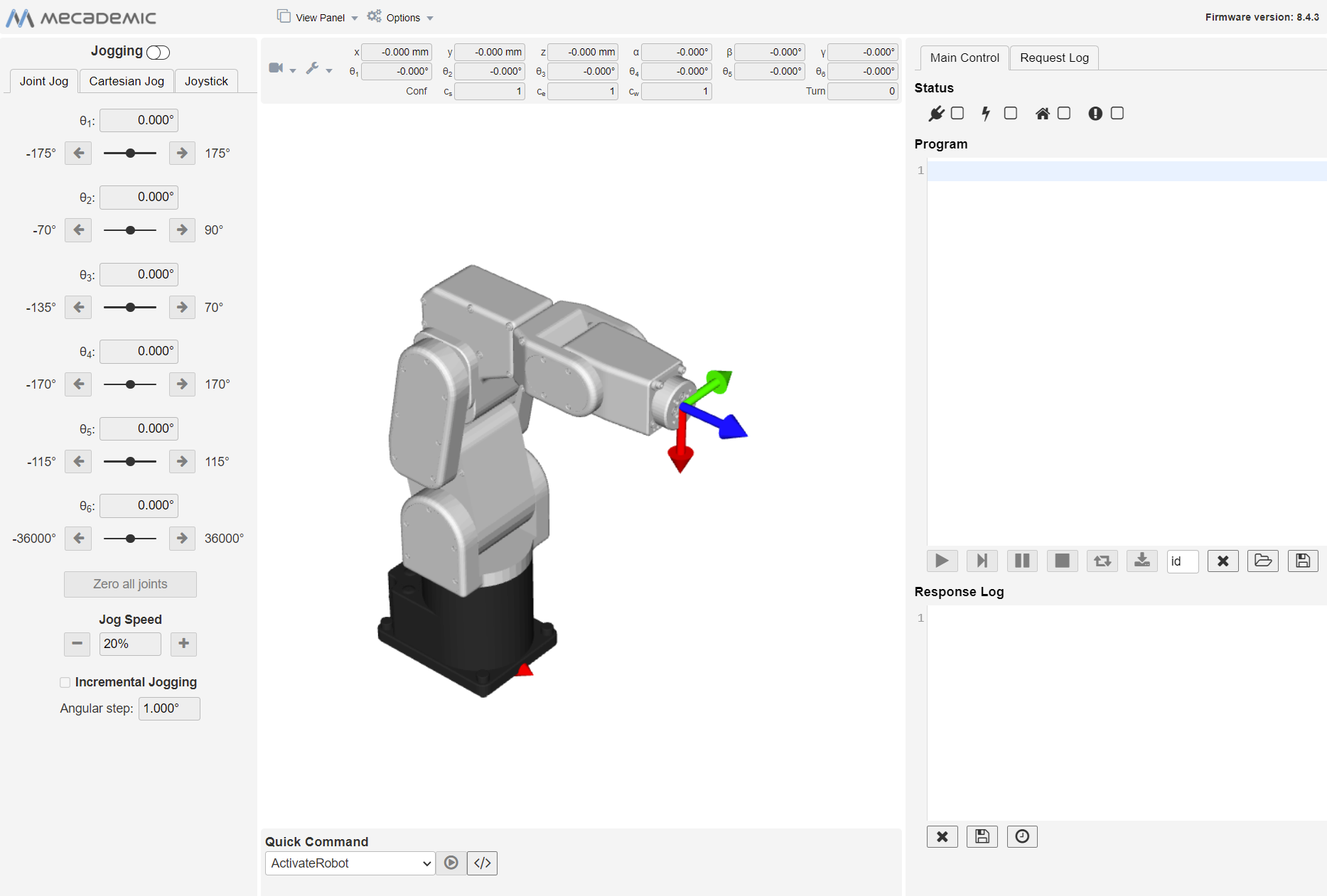
1.웹브라우저에서 Mecademic 웹인터페이스를엽니다(로봇 IP 주소입력).
2.스크립트콘텐츠를복사하여프로그램 편집기에붙여넣습니다.
3.상태 표시줄에서로봇연결, 활성화, 홈을 차례로클릭합니다.
4.재생 버튼을클릭하여프로그램을실행합니다.
5.저장 버튼을클릭하여로봇에프로그램을업로드합니다.
PY 파일 실행 방법
Mecademic TCP/IP 인터페이스를사용하여 Mecademic 로봇에자동으로연결하고프로그램을원격으로실행하는 Python 파일을생성할수있습니다.
Mecademic Python이라는포스트프로세서를선택해야합니다. 다음단계는 Mecademic에서 PY 파일을실행하는절차를요약한것입니다.
1.프로그램을마우스오른쪽버튼으로클릭하고포스트 프로세서 선택을 선택합니다.
2.Mecademic Python 선택
3.프로그램을마우스오른쪽버튼으로클릭하고로봇 프로그램 생성(F6)을선택합니다.
4.생성된 PY 파일을디스크에저장합니다.
5.IDE에서 PY 파일을열어실행하거나 Python 환경에서직접실행하세요.