각도
Yaskawa Motoman 로봇은각도조인트위치를펄스로또는그반대로변환하기위해각조인트에대한각도당펄스를요구합니다. 로봇매개변수에각도당펄스비율이제공되는경우 RoboDK는정확한펄스정보로프로그램을자동생성합니다.
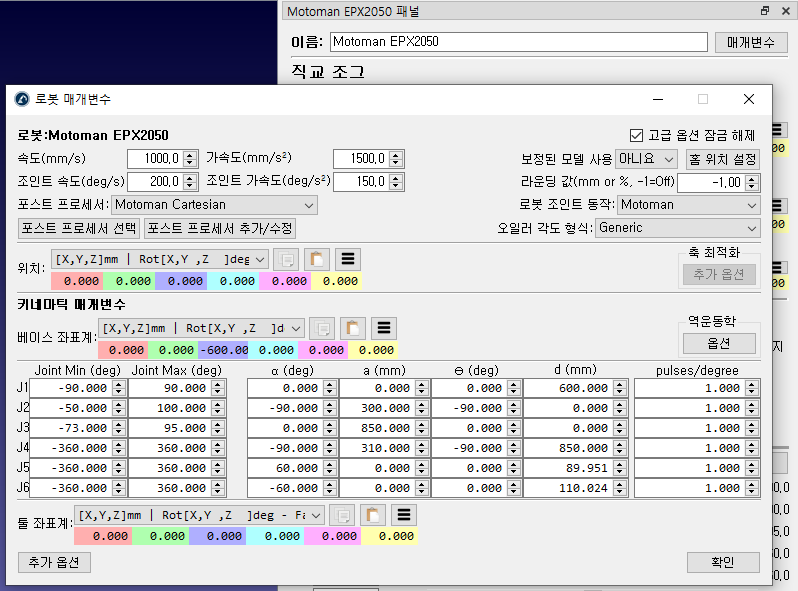
로봇에서이정보가사용가능한지확인하거나업데이트하려면다음단계를수행하십시오.
1.RoboDK에서 Yaskawa Motoman 로봇을더블클릭하십시오.
2.매개변수를선택하십시오.
3.고급 옵션 잠금 해제를선택하십시오.
4.각조인트의펄스 / 각도값을검토또는업데이트하십시오.
이정보가업데이트되면올바른펄스 / 각도정보로프로그램을생성할수있습니다.