USB
기본포스트프로세서를사용하면프로그램을 ZIP 파일로얻을수있습니다. 로봇에파일을제대로로드하려면다음과같은특성을가진 USB 드라이브를준비해야합니다:
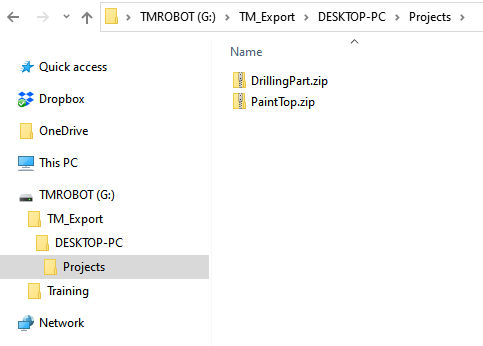
1.USB 드라이브의이름을 TMROBOT으로지정합니다(이단계가중요합니다).
2.드라이브의루트에 TM_Export라는새폴더를만듭니다.
3.프로젝트가있는 TM_Export 내에새폴더를만듭니다(어떤이름이라도상관없습니다).
4.이전폴더안에 Projects라는새폴더를만듭니다.
5.프로젝트폴더안에 ZIP 프로그램을배치합니다.
중요: TM_Export 내의USB 드라이브이름과디렉토리트리가중요하며, 그렇지않으면로봇컨트롤러에서파일을볼수없습니다. TM_Export 폴더내의디렉터리트리를변경하지않으면이 USB 드라이브를다른용도로계속사용할수있습니다.
다음단계에따라TMFlow에서프로그램을로드합니다:
1.이전단계에따라RoboDK에서생성한 ZIP 파일을 USB 드라이브의폴더에저장합니다.
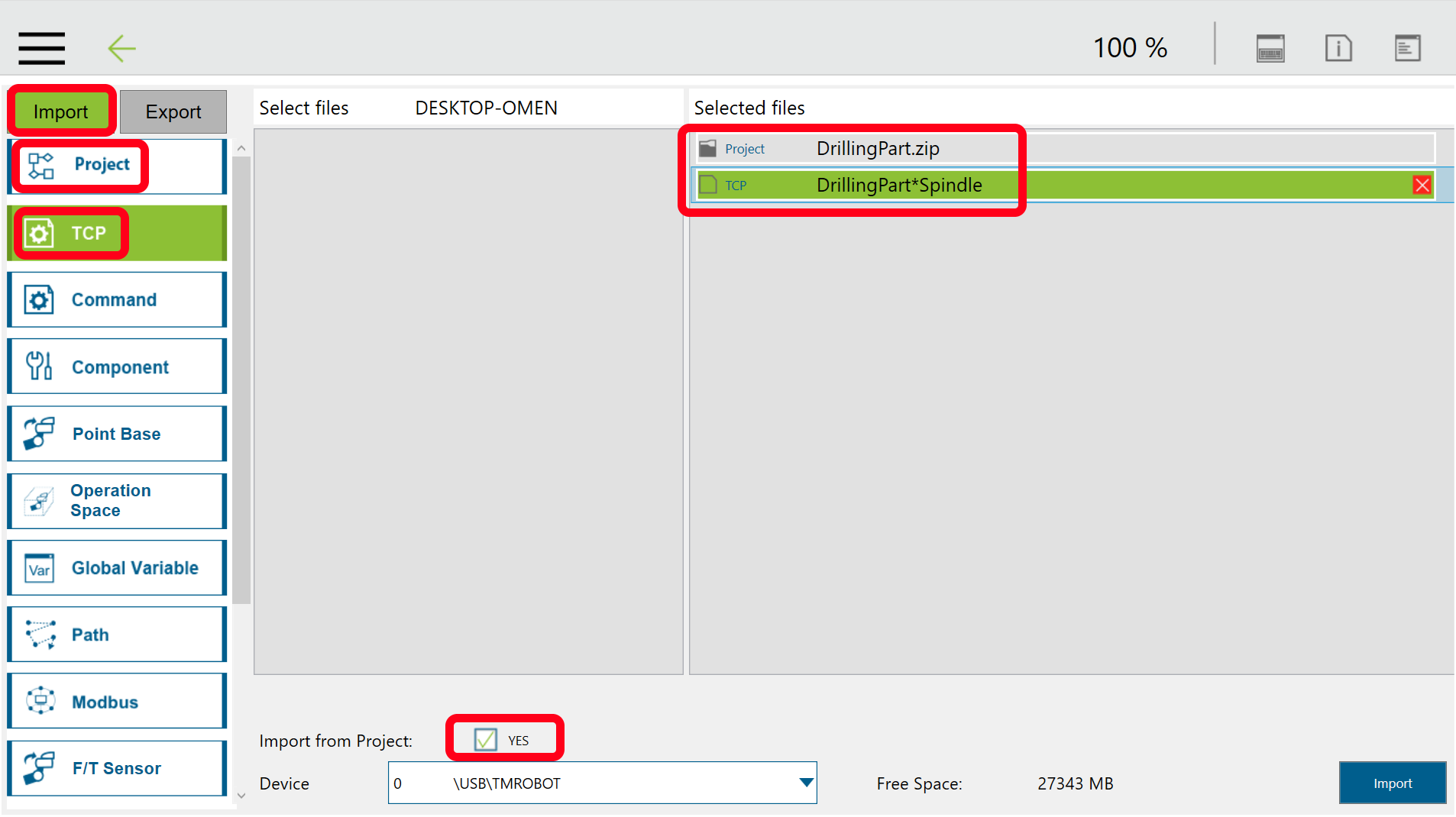
2.메인메뉴선택➔시스템➔가져오기/내보내기
3.가져오기를선택하고 TM_Export에서폴더를선택합니다.
4.프로젝트를선택하고 ZIP 프로그램을선택합니다.
5.TCP 선택
6.프로젝트에서가져오기옵션확인➔예
7.프로그램을선택하고프로그램에서도구를선택하여로드하는지확인합니다.
8.가져오기를선택합니다.
이제새프로그램을열도록선택하면해당프로그램을사용할수있습니다.
참고: 로봇컨트롤러에이미정의된도구가있는경우 5,6,7단계를따르지않아도됩니다. 대신로봇컨트롤러에표시되는것과동일한이름으로 RoboDK에서도구이름을지정하면됩니다.