Omron-TM 로봇
Omron-TM 로봇은 TMFlow ZIP 파일을사용하여 RoboDK에서오프라인으로프로그래밍할수있습니다. 또한로봇이리스닝 노드에있을때로봇드라이버를사용하여 RoboDK에서로봇을실시간으로직접움직일수도있습니다.
USB를 통해 파일 전송
기본포스트프로세서를사용하면프로그램을 ZIP 파일로얻을수있습니다. 로봇에파일을제대로로드하려면다음과같은특성을가진 USB 드라이브를준비해야합니다:
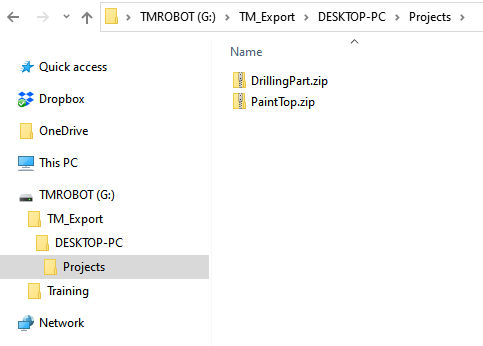
1.USB 드라이브의이름을 TMROBOT으로지정합니다(이단계가중요합니다).
2.드라이브의루트에 TM_Export라는새폴더를만듭니다.
3.프로젝트가있는 TM_Export 내에새폴더를만듭니다(어떤이름이라도상관없습니다).
4.이전폴더안에 Projects라는새폴더를만듭니다.
5.프로젝트폴더안에 ZIP 프로그램을배치합니다.
다음단계에따라TMFlow에서프로그램을로드합니다:
1.이전단계에따라RoboDK에서생성한 ZIP 파일을 USB 드라이브의폴더에저장합니다.
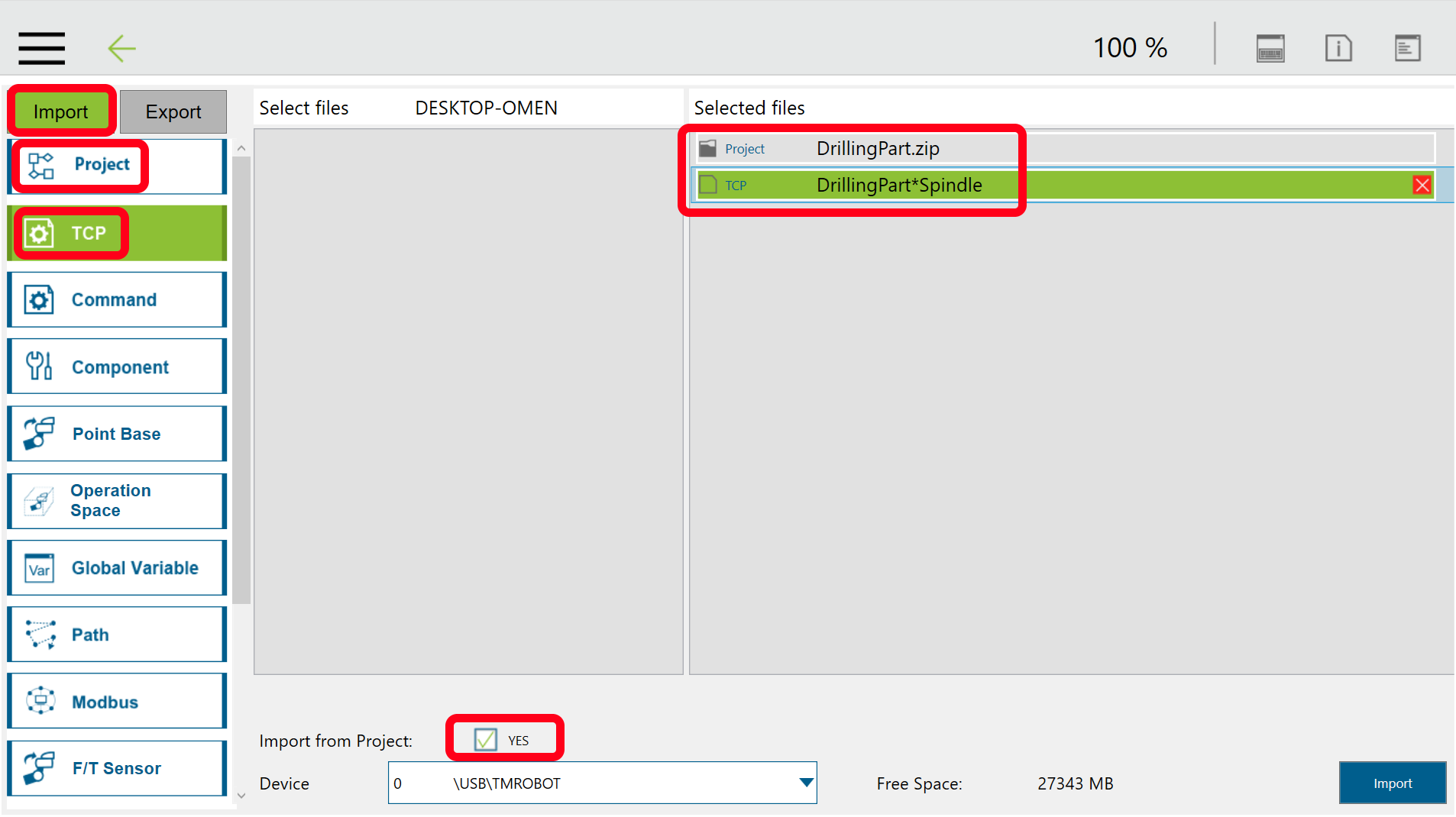
2.메인메뉴선택➔시스템➔가져오기/내보내기
3.가져오기를선택하고 TM_Export에서폴더를선택합니다.
4.프로젝트를선택하고 ZIP 프로그램을선택합니다.
5.TCP 선택
6.프로젝트에서가져오기옵션확인➔예
7.프로그램을선택하고프로그램에서도구를선택하여로드하는지확인합니다.
8.가져오기를선택합니다.
이제새프로그램을열도록선택하면해당프로그램을사용할수있습니다.
수신 노드 설정
Omron-TM용 RoboDK 드라이버를 사용하여로봇에서직접 Omron-TM 로봇의프로그램을실행할수있습니다. TCP/IP 프로토콜을통해스트리밍되는스크립트파일로프로그램을생성할수도있습니다. 두경우모두로봇이수신 노드에 있는지확인해야합니다. 이섹션에서는 RoboDK와 Omron-TM 로봇에서통신을설정하는방법에대해설명합니다.
다양한 포스트 프로세서 중에서선택하거나포스트프로세서를사용자지정하여프로그램이오프라인에서생성되고실행되는방식(예: 그리퍼또는외부센서지원)을정의할수있습니다.
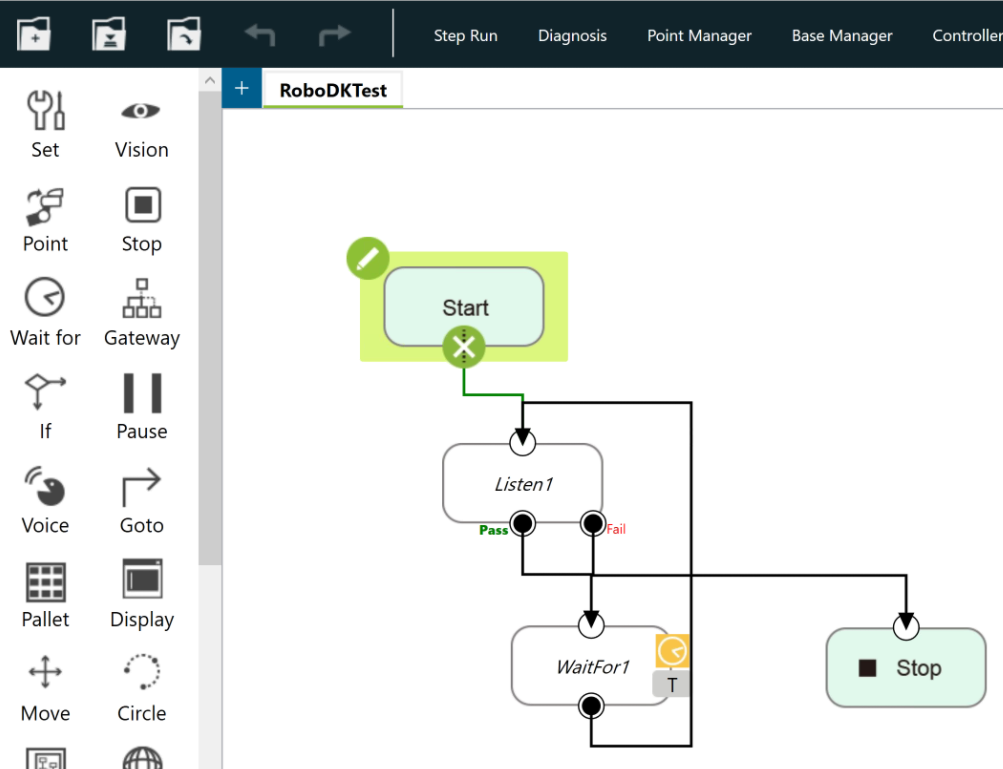
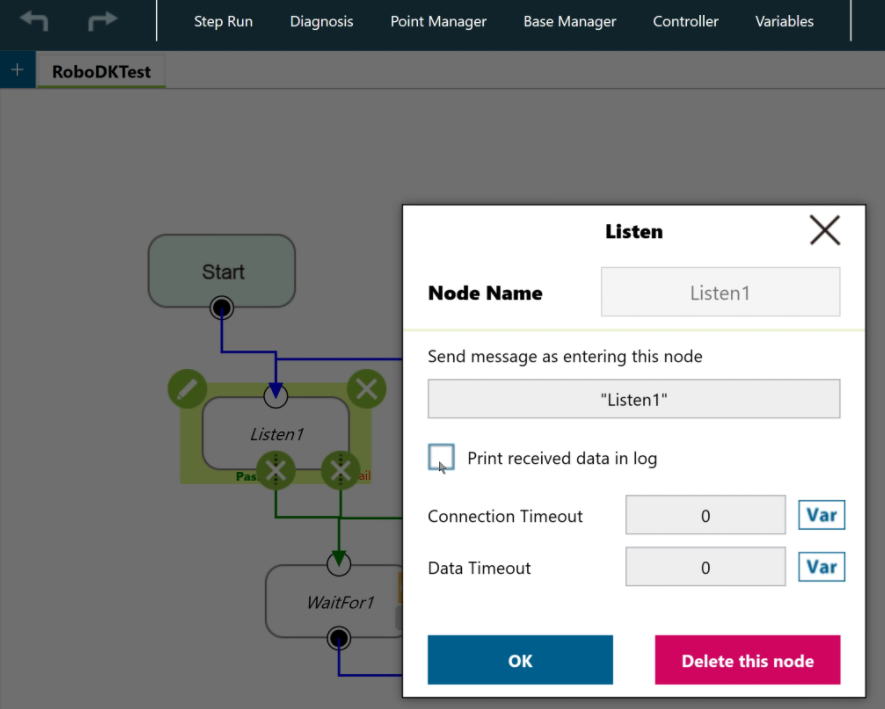
로봇이원격으로움직이려면로봇이리스닝 모드에 있어야합니다. 이는 Listen 노드를 사용하여수행됩니다. 다음이미지는 RoboDK에서보낸프로그램을자동으로실행하는프로그램워크플로우를보여줍니다. 문제해결을위해수신된 데이터를 로그에 인쇄를 선택하는것이좋습니다.
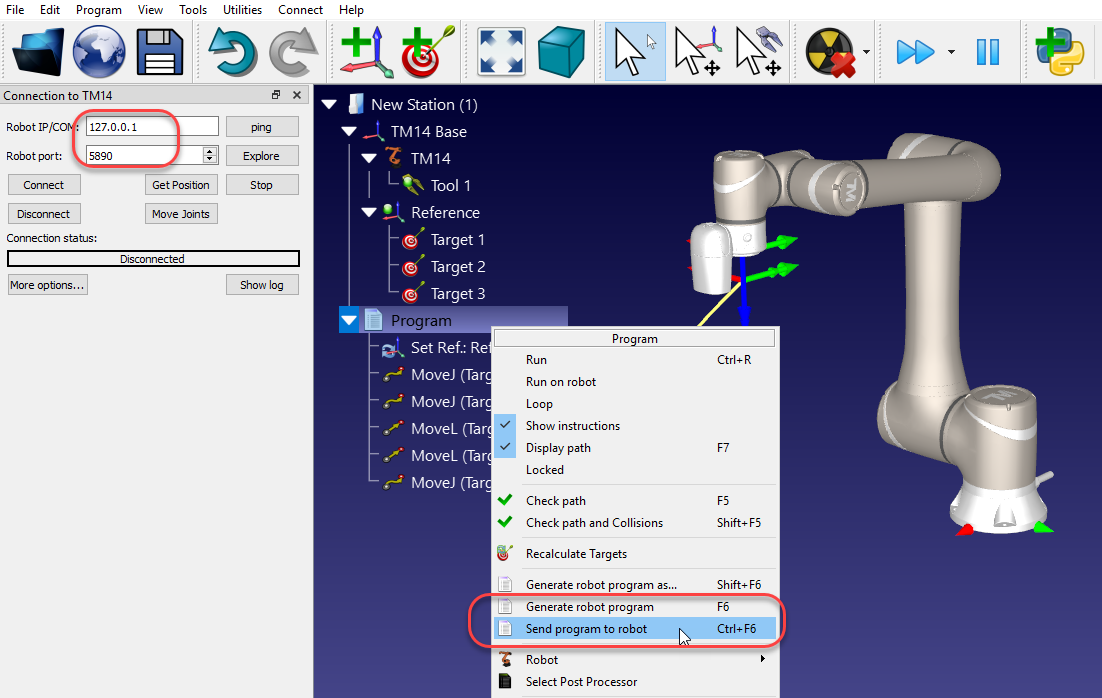
다음단계에따라 RoboDK에서통신을설정하고프로그램을실행하세요:
1.연결➔ 로봇 연결 선택
2.로봇 IP 입력
3.포트 5890을입력합니다.
4.프로그램을마우스오른쪽버튼으로클릭합니다.
5.로봇 프로그램 생성 F6을 선택합니다.