로봇
이섹션의단계를따르는것은선택사항이며오프라인프로그래밍에서정확도가필요한특정상황에서만필요합니다. 이섹션에서는로봇을정확하게시뮬레이션하기위해 RoboDK의 UR 로봇에서고유운동학값을입력하는방법에관해설명합니다.
UR 컨트롤러운동학은로봇마다고유합니다. 운동학은 DH 테이블(Denavit Hartenberg)의형태로로봇을정의하는수치입니다. RoboDK 시뮬레이터는기본적으로공칭 UR 운동학을사용하므로시뮬레이터운동학과컨트롤러운동학사이에 2mm에서 10mm의불일치가나타날수있습니다.
시뮬레이션을실제로봇과일치시키려면다음절차에따라 UR 로봇특정운동학을가져올수있습니다.
1.실제로봇을사용하여생성된 URP 파일을검색하십시오(RoboDK 또는 UR 시뮬레이터를사용하지않음).
2.RoboDK에서로봇을여십시오. UR 로봇은 RoboDK 라이브러리에서찾을수있습니다. 기존 RoboDK 스테이션중하나에서사용가능한 UR 로봇을사용할수도있습니다.
3.도구 – 스크립트 실행을 선택하십시오.
4.UR_LoadControllerKinematics를 선택하십시오.
5.로봇 컨트롤러에서 추출한 URP 파일을 선택하십시오.
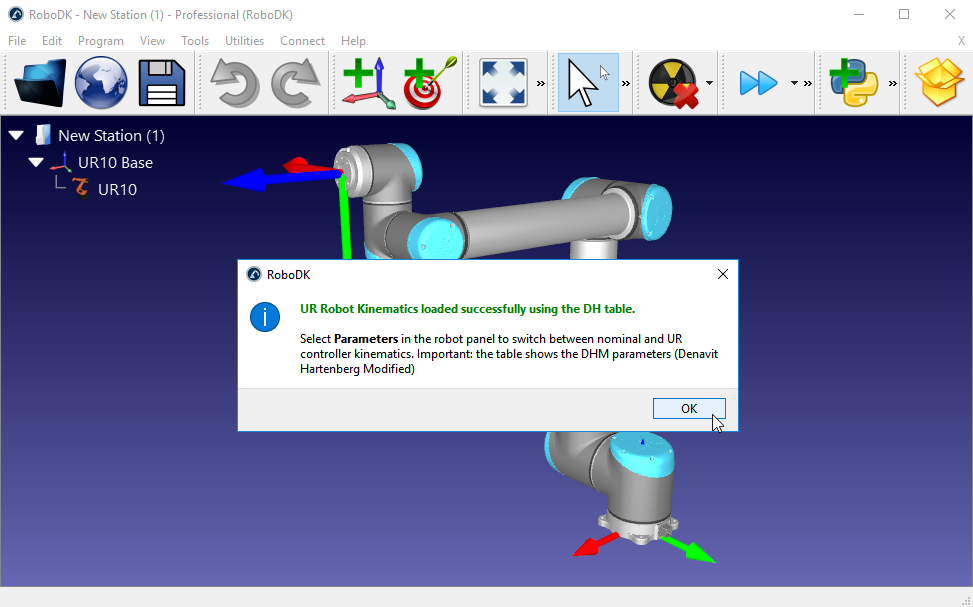
다음 이미지와 같은 메시지가 나타납니다. 유효한 URP 파일을 불러오지 않았거나 올바른 UR 로봇을 선택하지 않으면 경고 메시지가 표시될 수 있습니다.
이절차가완료되면로봇을마우스오른쪽버튼으로클릭하고.robot으로 저장을선택하십시오. 이러한매개변수는로봇파일과함께저장되며모든새프로젝트에대해이절차를반복하는대신로봇파일을사용할수있습니다.
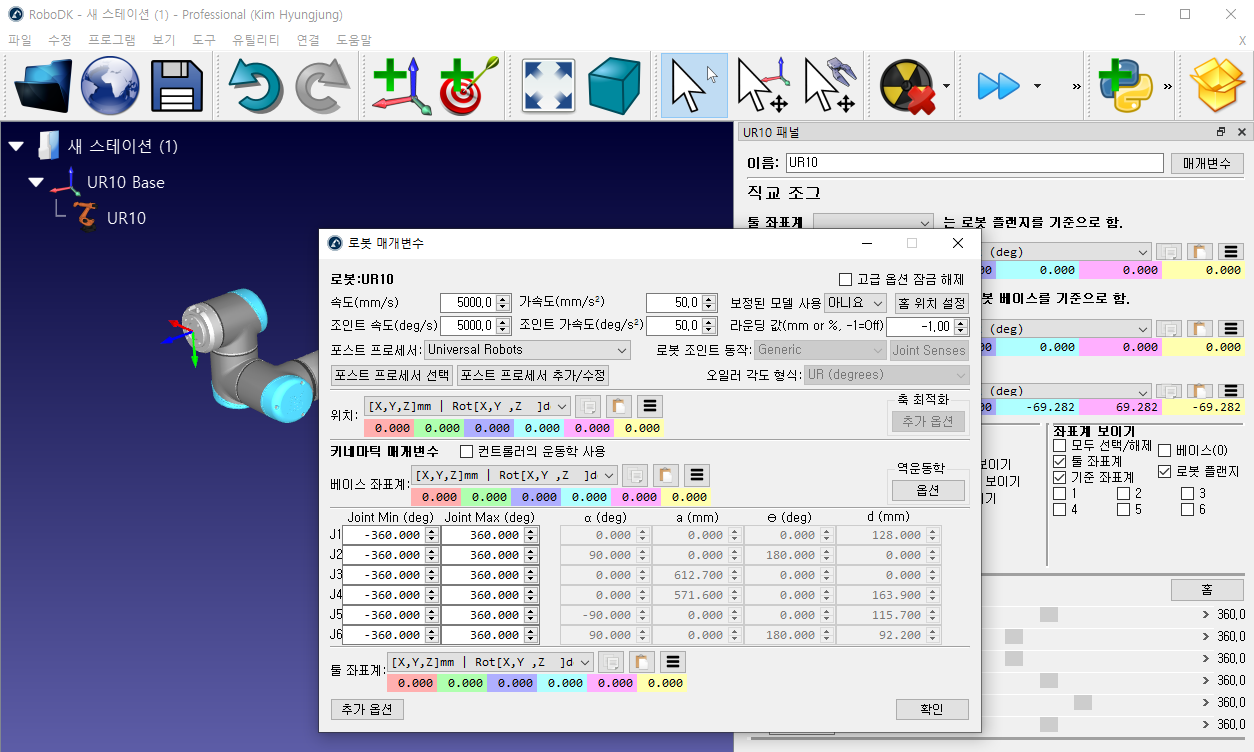
RoboDK는 URP 파일에서로봇관련정보를추출하여로봇파일의시뮬레이션및오프라인프로그래밍을고려합니다. 다음 그림과 같이로봇매개변수메뉴에서이설정을변경하고기본운동학으로되돌릴수있습니다.
티치펜던트에표시되는포즈정보가 RoboDK에표시된운동학과일치함을알수있습니다(RoboDK 및 UR 로봇에서툴 좌표계 및 기준 좌표계를 제거하여비교하십시오).
UR 운동학은각로봇이공장에서 UR에의해교정되기때문에한로봇에서다른로봇으로변경됩니다. KUKA, ABB, Motoman 또는 Fanuc과같은다른로봇공급업체는소위절대 정확도옵션을구매하지않으면로봇을교정하지않습니다. 절대정확도옵션은최대 40개의교정매개변수이상을고려할수있습니다.
이절차는RoboDK의 로봇 보정과같지않습니다. 로봇보정은실제로봇의정확도를향상하는데도움이됩니다.