UR
RoboDK에서 프로그램이 준비되면 SCRIPT 및/또는 URP 프로그램을 생성할 수 있습니다. 이 두 파일은 로봇 컨트롤러에서 실행할 수 있습니다. RoboDK 시뮬레이션에서 SCRIPT 및 URP 프로그램을 생성하려면 다음 단계를 수행하십시오.
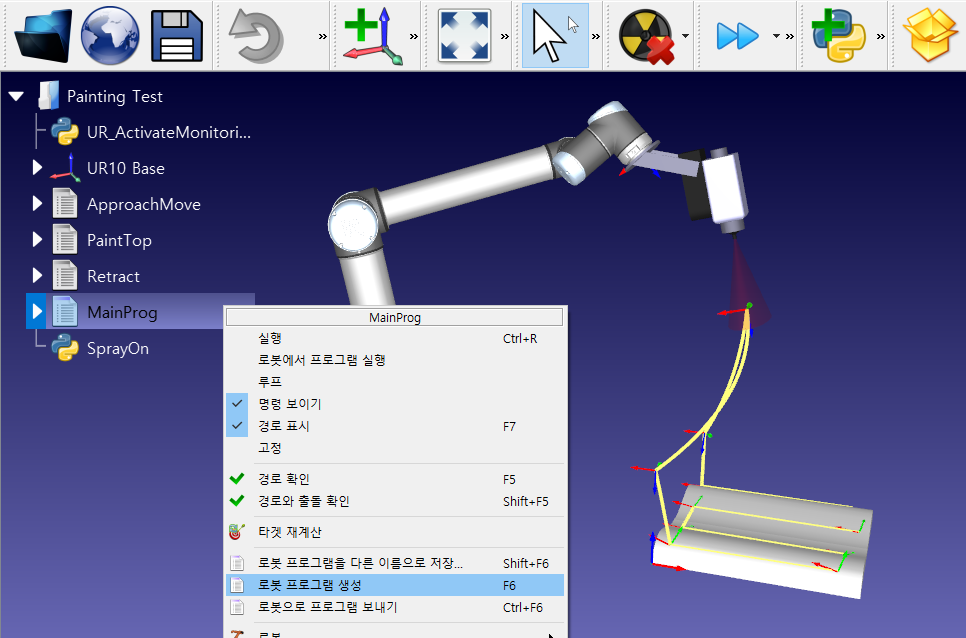
1.프로그램(이 예에서는 Print3D)을 마우스 오른쪽 버튼으로 클릭하십시오.
2.로봇 프로그램 생성(F6)을 선택하십시오.
프로그램 생성에 성공하면 프로그램이 텍스트 편집기에 표시됩니다. 이 동작은 메뉴의 도구 ➔옵션 ➔프로그램에서 변경할 수 있습니다.
SCRIPT 및 URP 파일전송은 SFTP 전송또는 USB 드라이브를통해수행할수있습니다.
URP 프로그램 불러오기
다음단계는유니버설로봇에 URP 파일을불러오는절차입니다.
1.프로그램을마우스오른쪽버튼으로클릭하고포스트 프로세서 선택을선택하십시오.
2.Universal Robots URP를선택하십시오.
기본게시물은 URP 파일도생성하므로처음두단계는선택사항이지만스크립트파일을실행하는 URP 프로그램대신사용자가읽을수있는 URP 프로그램을생성할수있습니다.
3.프로그램을마우스오른쪽버튼으로클릭하고로봇 프로그램 생성(F6)을선택하십시오.
4.생성된 URP 파일을 USB 메모리디스크에저장하십시오.
5.USB 메모리디스크를로봇티치펜던트(UR 's Polyscope)에연결하십시오.
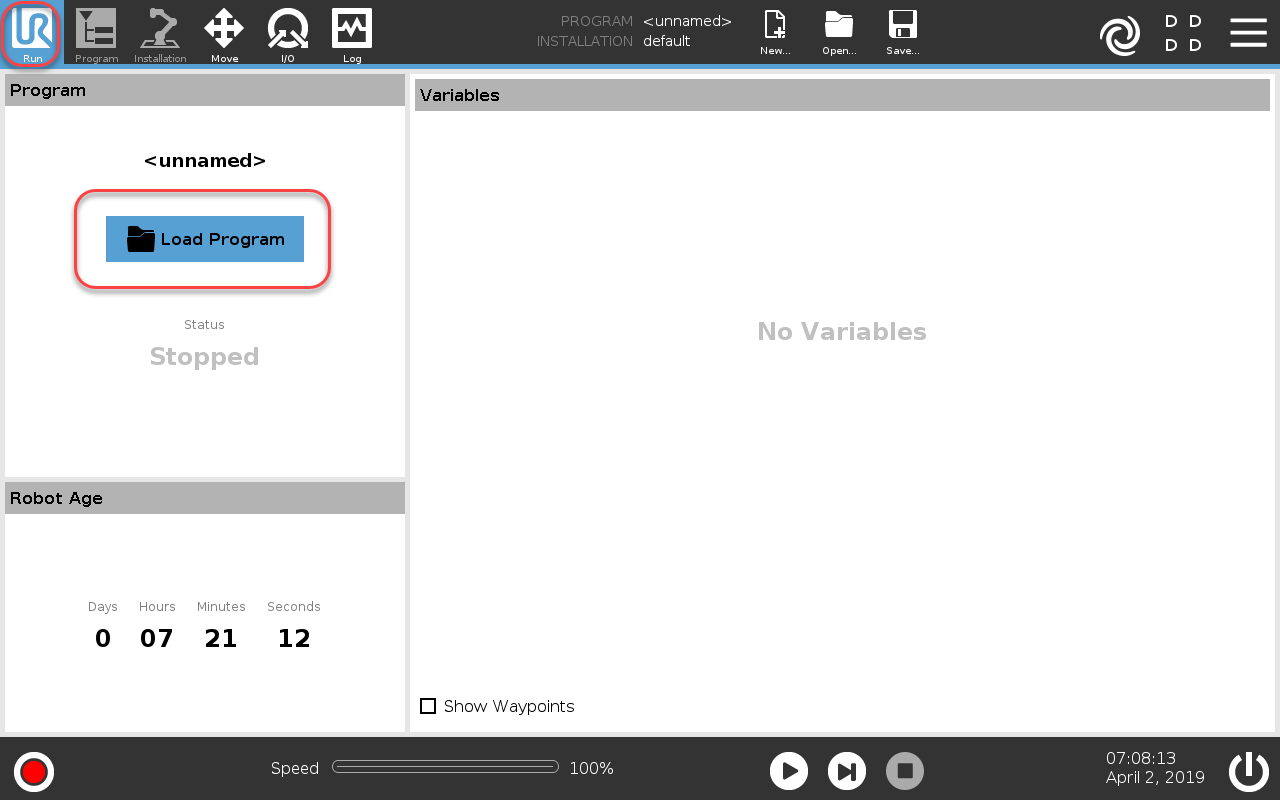
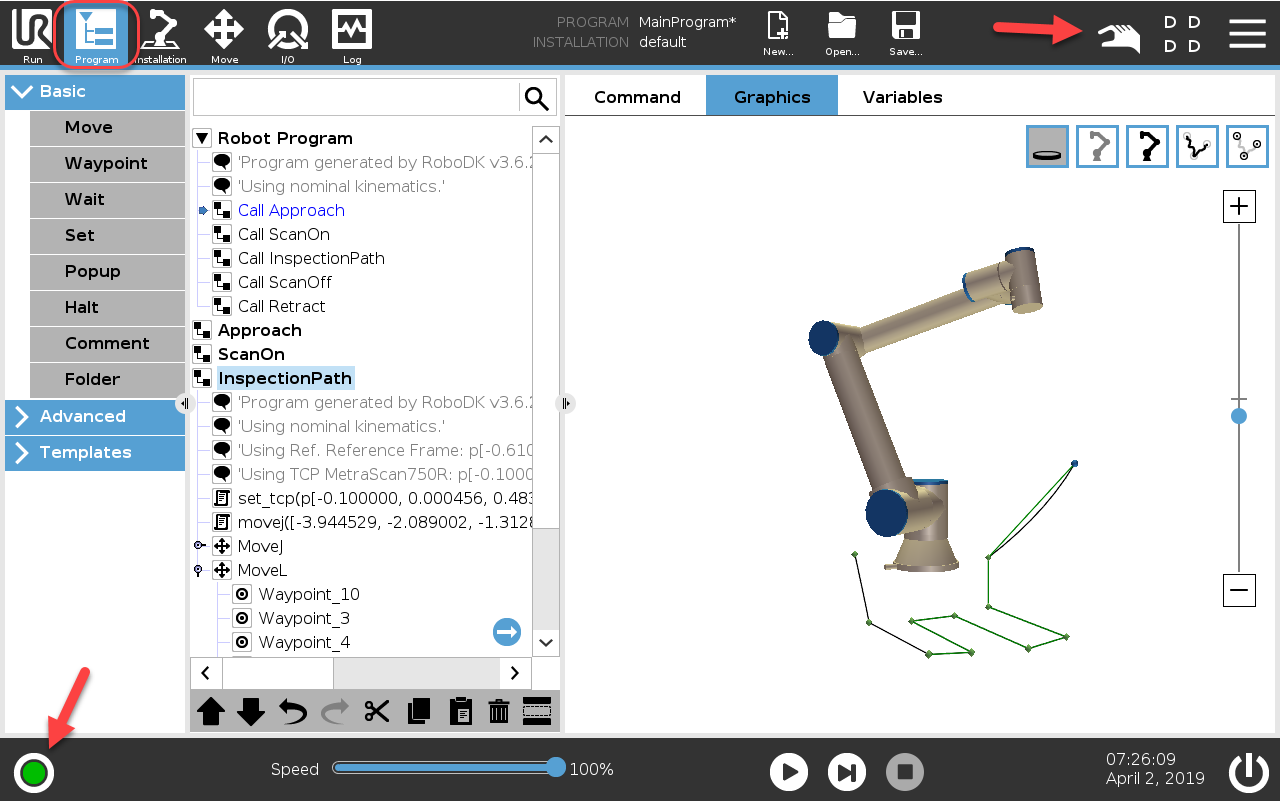
6.로봇티치펜던트에서실행탭을선택하십시오.
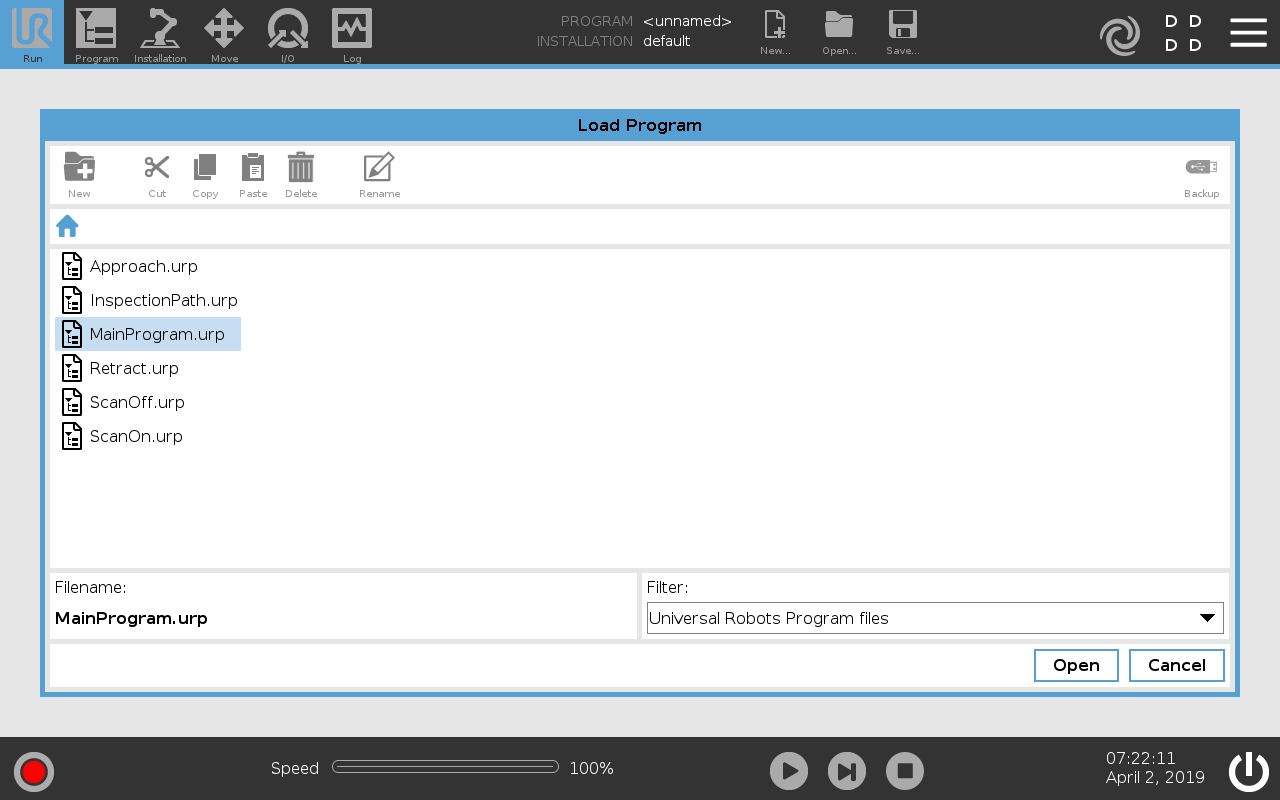
7.프로그램 불러오기를선택하고 RoboDK에서생성된프로그램을불러오십시오.
8.프로그램탭을선택하고재생버튼을선택하여시작하십시오.
9.재생버튼을선택하여프로그램을시작하십시오.
Script 파일 불러오기
다음단계와 그림은 로봇에서 SCRIPT 프로그램을실행하는절차입니다. 다음단계는 URP 프로그램파일을실행하는데필요하지않습니다.
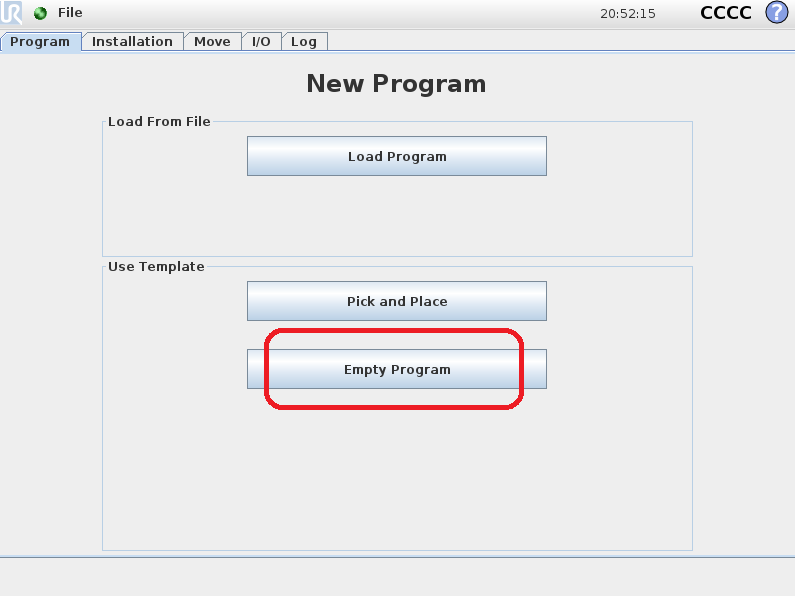
1.티치펜던트의메인화면에서프로그램 로봇을선택하십시오.
2.새 프로그램을 선택하십시오.
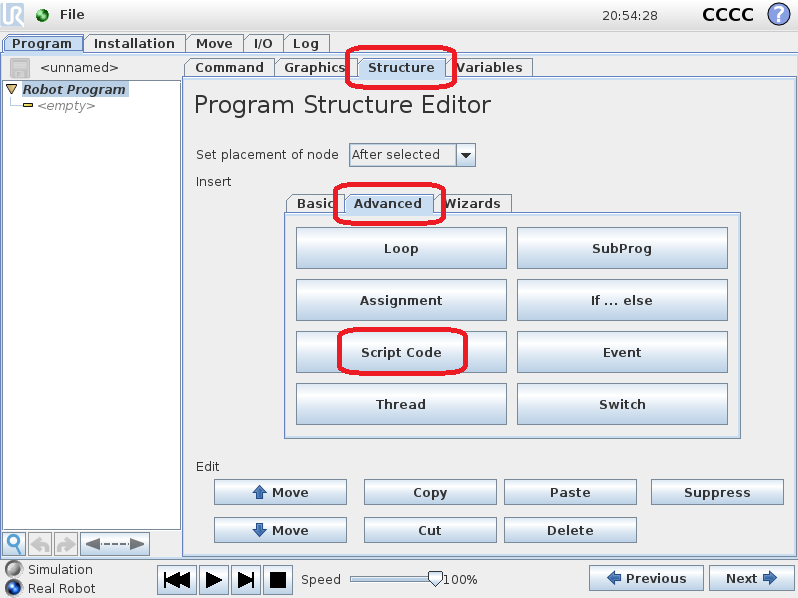
3.구조 탭을 선택하십시오.
4.고급 탭을 선택하십시오.
5.스크립트 코드를 선택하십시오.
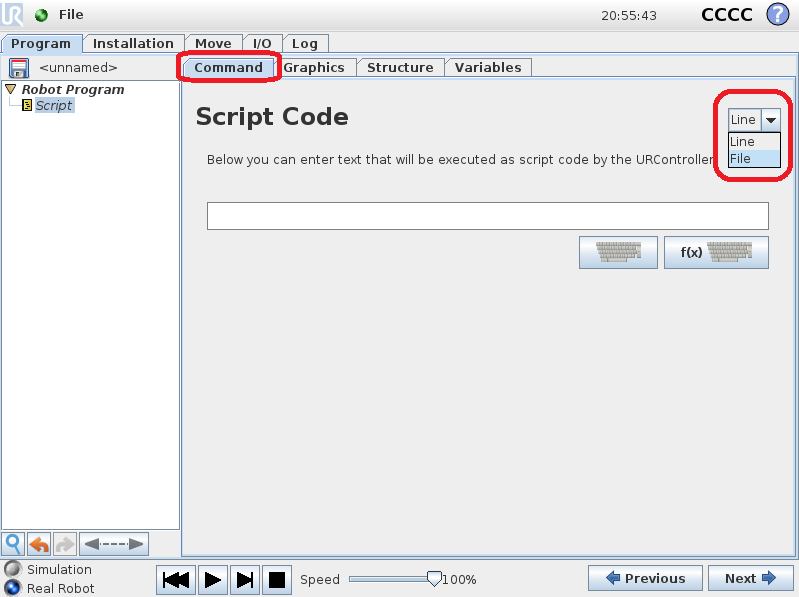
6.그림에 표시된 대로 파일을 선택하십시오.
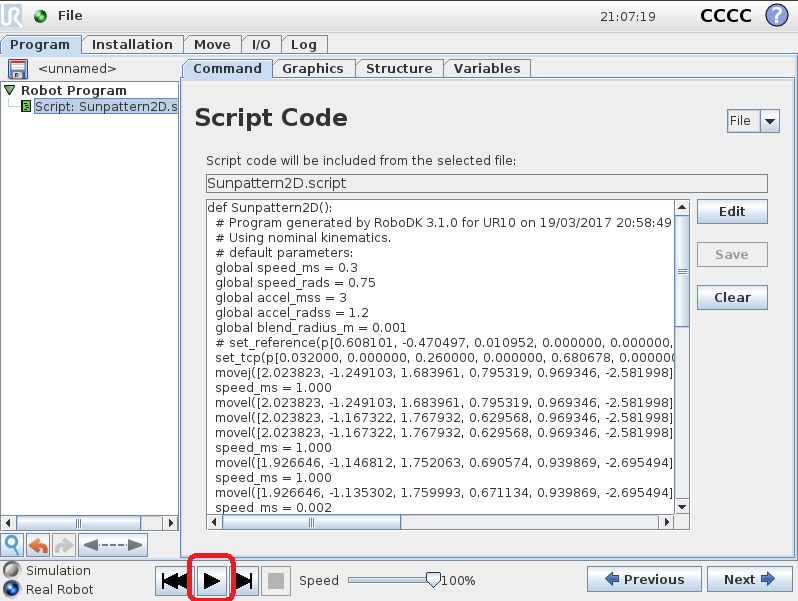
7.RoboDK가 생성한 스크립트 파일을 선택하십시오.
8.재생 아이콘을 선택하여 프로그램을 실행하십시오.
9.파일 ➔저장을 선택하여 변경 사항을 저장하십시오.
10.마지막으로 프로그램을 실행할 수 있습니다.