프로그램
로봇이보정된후에는로봇보정을활용하기위해필터링된프로그램을생성하거나보정된로봇파라미터를고려해야합니다.
보정후로봇을정확하게프로그래밍하려면다음방법중하나만따라야합니다:
1.정확한프로그램을생성하려면오프라인 프로그래밍용 RoboDK를사용합니다(생성된프로그램은이미필터링되어있음). 최적의정확도결과를위해권장되는오프라인프로그래밍옵션입니다.
2.로봇 컨트롤러 매개변수(예: 링크길이, DH-DHM 매개변수및/또는마스터링매개변수)를보정합니다.
정확한 오프라인 프로그래밍
로봇이 RoboDK로보정된경우로봇을마우스오른쪽버튼으로클릭하고정확한 운동학 사용을 선택하여정확한운동학을활성화하는옵션이있습니다.
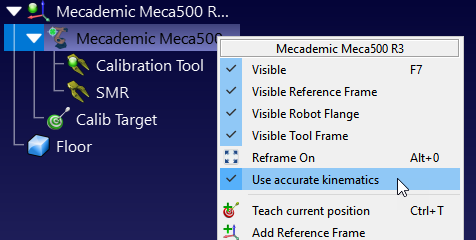
정확도가활성화되어있으면녹색점이표시되고, 활성화되어있지않으면빨간색점이표시됩니다.
최적의정확도결과를얻기위해권장되는옵션입니다. 로봇정확도옵션을활성화하면 RoboDK에서생성된모든프로그램이자동으로필터링됩니다. 즉, 로봇오류를보정하기위해모든데카르트좌표가약간수정됩니다.
로봇가공에로봇을사용하거나 NC 파일에서로봇을프로그래밍하거나 RoboDK에서지원하는 CAD/CAM 플러그인을사용할계획이라면이옵션이가장적합합니다.
중요: 정확성을위해프로그램을생성할때프로그램의첫번째동작이관절동작인지확인하세요.
중요: 중요: 프로그램을생성한후에는로봇구성을변경하지않아야합니다.
참고: 필터링하기전에도구중심점(TCP)과기준프레임이 RoboDK에서 보정 및정의되었는지확인해야합니다(실제설정의값과일치).
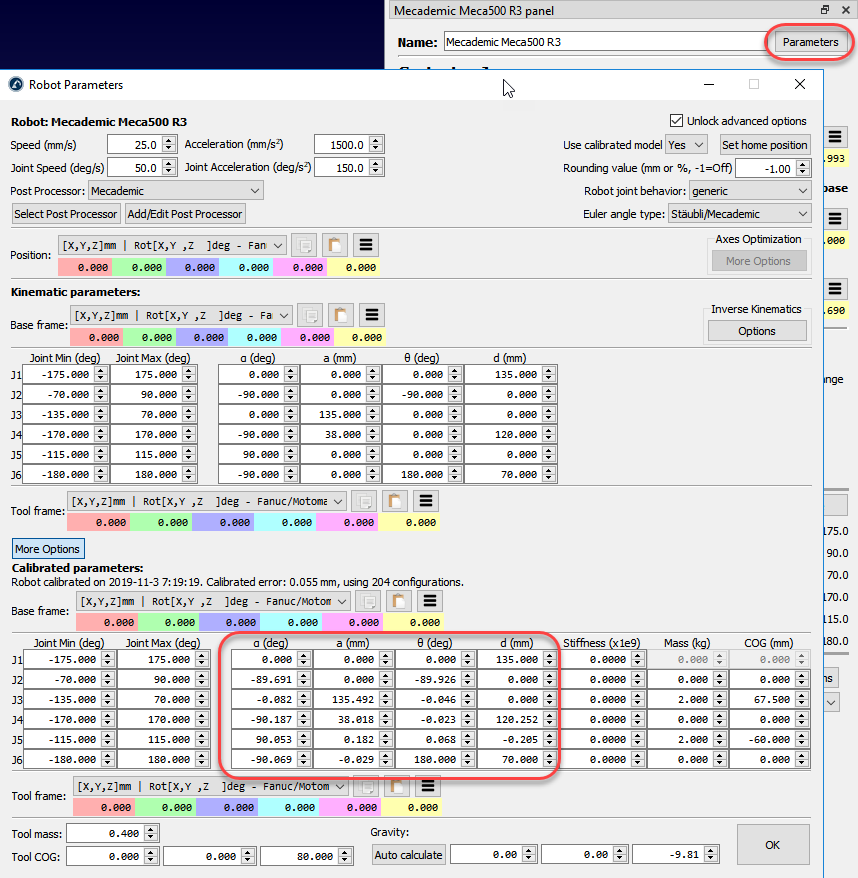
로봇 파라미터 보정
로봇이보정된후에는파라미터메뉴에서보정된파라미터에액세스할수있습니다. 일부로봇컨트롤러에서는특정로봇매개변수를수정할수있습니다.
참고: RoboDK는 Denatit-Hartenberg 수정규칙을사용합니다. 선택/보정된모든파라미터를사용해야합니다.
중요: 로봇컨트롤러파라미터를업데이트하는경우필터링된프로그램이생성되지않도록해야합니다.