좌표계
RoboDK TwinTrack을사용하면좌표계(또는참조프레임)를탐색하고위치를파악하여로봇작업공간에서물체의위치를찾을수있습니다.
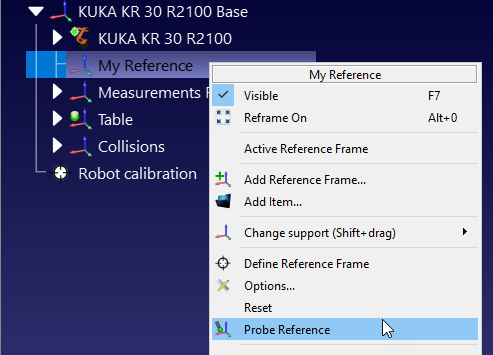
좌표계를마우스오른쪽버튼으로클릭하고프로브 참조를 선택합니다.
팁: 사용자지정기준프레임이없는경우로봇베이스에새 기준 프레임을 추가해야 합니다(프로그램➔기준프레임추가선택).
그런다음다음순서대로 3개지점을조사해야합니다:
1.원점의첫번째지점.
2.양의X축을따라두번째점입니다.
3.양의Y축을따라세번째점입니다.
좌표계를올바르게설정하면로봇을원격으로프로그래밍할수있습니다. 예를들어제대로정의된픽스처가있다면새부품을프로그래밍할때로봇근처에가지않고도사무실이나집에서간단히프로그래밍할수있습니다.
영상: RoboDK TwinTrack을사용하여좌표계를만드는방법: https://youtu.be/IP2UMXQk-nY?t=32.