참조
RoboDK는기준프레임과도구프레임을보정하는몇가지유틸리티를제공합니다. 이러한도구는각각유틸리티➔ 참조 프레임 보정 및유틸리티➔ 도구 프레임 보정에서액세스할수있습니다.
참조프레임또는자동으로보정되지않은도구(각각사용자프레임및 TCP라고도함)를보정하려면 3개이상의점에닿는로봇구성이필요하며, 이러한로봇구성은조인트값또는데카르트좌표(경우에따라방향데이터포함) 중하나일수있습니다. 로봇좌표대신관절값을사용하면 RoboDK에서실제로봇구성을확인하기가더쉽기때문에(로봇관절을 RoboDK 메인화면에복사하여붙여넣기) 관절값을사용하는것이좋습니다.
중요: 로봇을보정할때는데카르트좌표대신관절값을사용하는것이좋습니다. 관절값을사용하면로봇의정확도를고려하여 TCP를더정확하게학습할수있습니다.
도구 보정
유틸리티➔ 보정 도구를 선택하여 RoboDK를사용하여 TCP를보정합니다. 다양한방향을사용하여원하는만큼많은포인트를사용할수있습니다. 더많은포인트와더큰방향변경을사용할수록 TCP 오차를더잘추정할수있을뿐만아니라더나은추정치를얻을수있습니다.
참고: 자세한내용은 팁 섹션에서 확인할수있습니다.
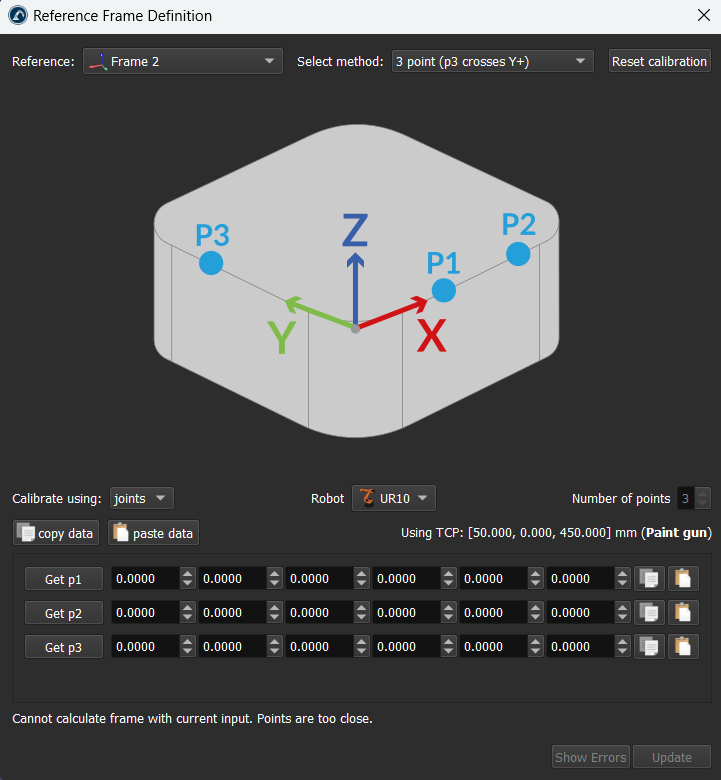
참조 프레임 보정
유틸리티➔ 참조 보정을 선택하여참조프레임을보정합니다. 다양한방법을사용하여기준프레임을설정할수있습니다. 그림의예에서기준프레임은세개의점으로정의됩니다. 점 1과 2는 X축방향을정의하고점 3은양의 Y축을정의합니다.
중요: 로봇팔의정확도가기준프레임을더잘정의하는데도움이되므로기준프레임을보정하기전에조인트타깃을사용하고로봇정확도를활성화하는것이좋습니다.
참고: 참조프레임보정에관한자세한내용은 팁 섹션에서 확인할수있습니다.