목표
RoboDK TwinTrack을사용하면프로브로포인트를티칭하여로봇타겟을수동으로생성할수있습니다.
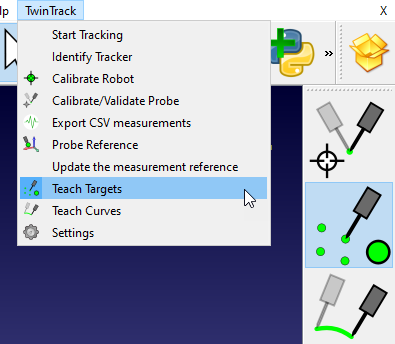
TwinTrack➔ 타깃 티칭을 선택하여타깃티칭모드를시작할수있습니다. 이버튼은기본적으로트윈트랙도구모음에서도사용할수있습니다.
RoboDK는손의위치를기반으로로봇의위치를실시간으로계산하여표시합니다. 로봇이도달할수있는영역을쉽게확인할수있습니다.
팁: TCP의방향을변경하여 RoboDK에서선택한로봇의기본방향을변경하세요.
타겟생성옵션을사용하면버튼을누를때마다하나의타겟을학습시킬수있습니다. 프로그램을생성하고싶으면프로브의두번째버튼을누르면 RoboDK가프로그램을시뮬레이션합니다:
●첫번째버튼: 대상을가르치세요.
●두번째버튼: RoboDK에서프로그램을생성하고시뮬레이션합니다.
●두번째버튼을길게누르면로봇에서프로그램을실행합니다.
영상: RoboDK TwinTrack을사용하여타겟을만드는방법: https://youtu.be/xiFEHs1GMdg?t=28.
참고: 접근거리와접근및작동속도와같은기타설정은TwinTrack➔ 설정을 선택하여변경할수있습니다.