가상 현실
RoboDK는가상현실(VR)을지원하여 RoboDK 시뮬레이션을시뮬레이션으로체험할수있습니다.
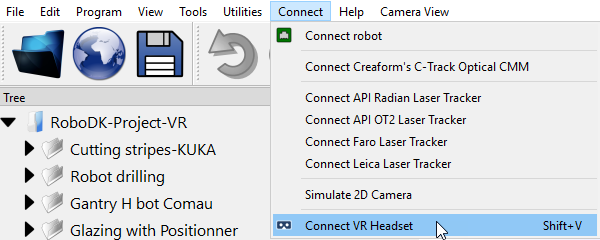
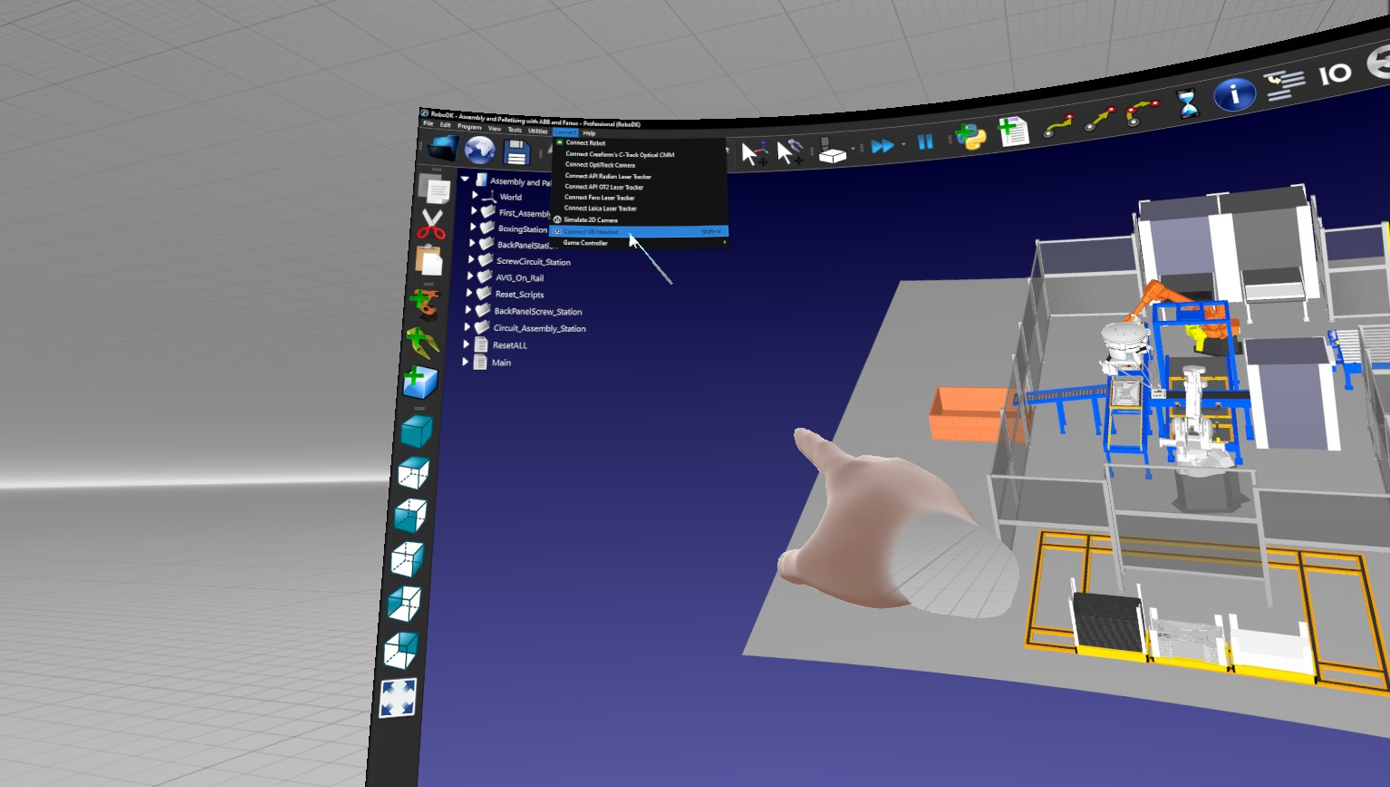
연결➔ VR 헤드셋 연결(Shift+V)을선택하여가상현실체험을시작합니다.
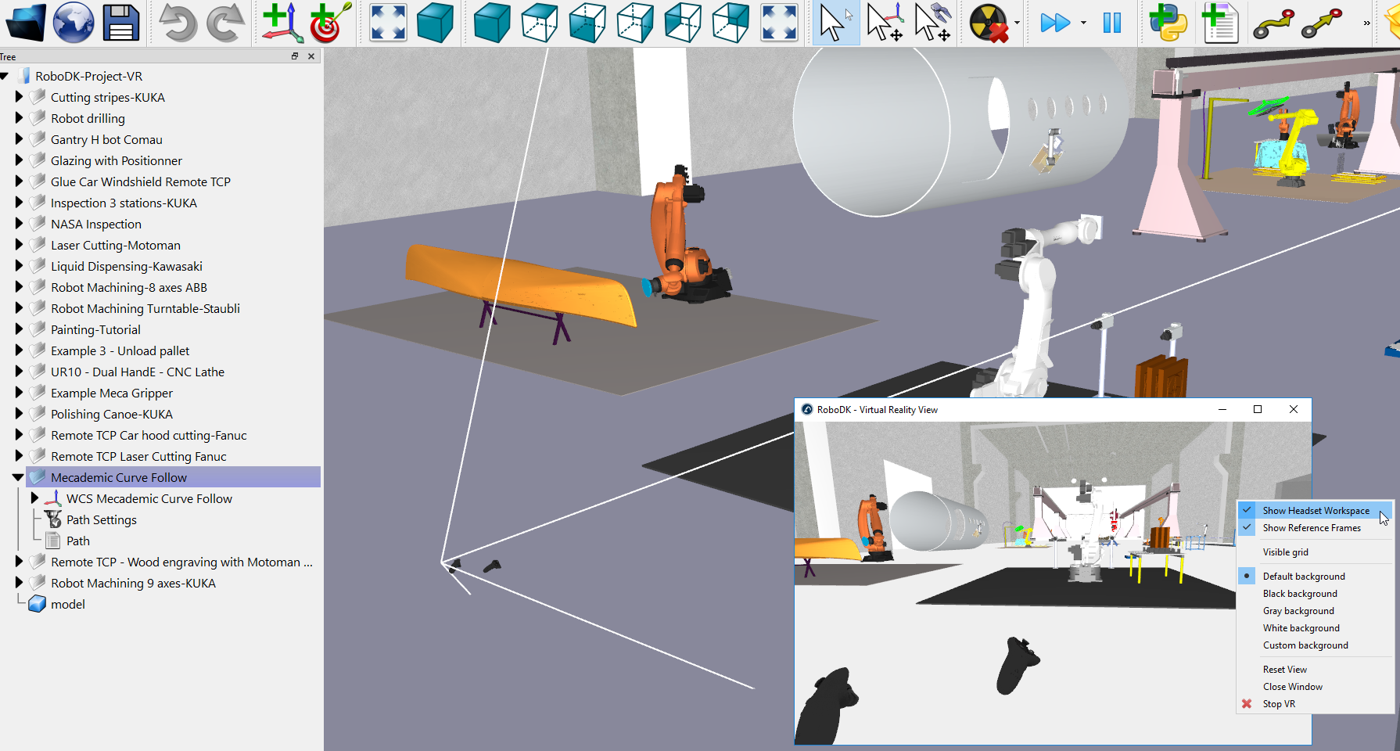
그러면 VR 보기를보여주는추가창이표시되고 VR 헤드셋이자동으로 RoboDK 셀을표시하기시작합니다.
가상 현실 액션
RoboDK는기본컨트롤러액션(컨트롤러바인딩) 세트를제공합니다.
●텔레포트: 오른쪽컨트롤러의위쪽화살표키를선택합니다.
●포인트: 트리거를살짝누르면포인터가표시됩니다.
●트리거: 트리거: 로봇을가리키고당기면해당로봇에연결된첫번째프로그램이시작됩니다.
●좌표계 표시/숨기기: 오른쪽컨트롤러의아래쪽화살표키를선택하여좌표계를표시하거나숨깁니다.
●위치를 잡고 이동합니다:한컨트롤러의잡기버튼을길게누릅니다(한번에하나씩).
●물체나 로봇을 잡습니다:좌표계를표시하고잡기동작을트리거하여물체를잡을수있습니다.
●방향을 잡고 이동합니다: 양쪽컨트롤러의잡기버튼을동시에누른상태에서스테이션을잡는것처럼회전합니다.
컨트롤러설정은 SteamVR의컨트롤러바인딩메뉴에서구성할수있습니다:
1.SteamVR에서 설정 선택
2.컨트롤러 선택
3.컨트롤러 바인딩 관리를 선택합니다.
4.RoboDK 선택
5.사용자 지정 선택
디스플레이 성능
셀이크거나복잡한경우(예: 많은개체또는복잡한지오메트리가있는경우) 프레임속도가느려질수있습니다. 프레임속도가낮은경우다음단계중하나이상을수행하여개선하는것이좋습니다.
프레임속도가 40FPS 이상인방송국에서 VR을사용하는것이좋습니다. 이섹션과디스플레이 성능 섹션에설명된단계에따라프레임속도를개선하세요.
또한다음팁은 VR을사용할때 RoboDK 시뮬레이션의디스플레이성능을개선하는데도움이됩니다:
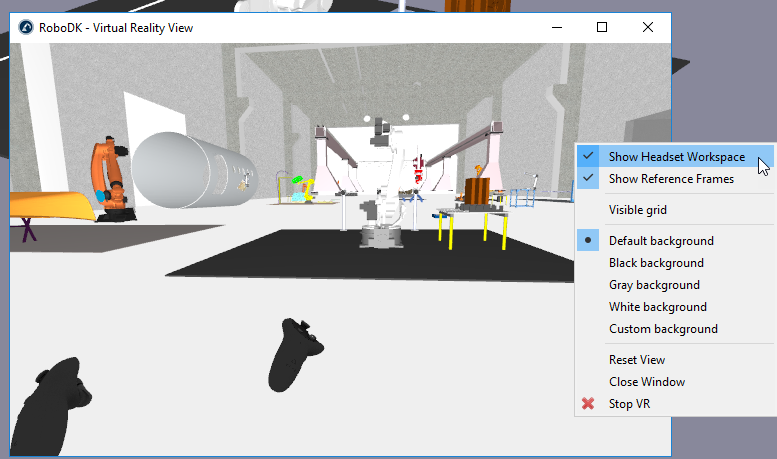
●헤드셋작업공간을숨깁니다: 가상현실보기를마우스오른쪽버튼으로클릭하고헤드셋 작업 공간 표시를 선택취소합니다. 이렇게하면메인창이렌더링되지않습니다.
●가상 현실 보기 창최소화: 이렇게하면가상현실 보기렌더링을방지하고그래픽카드의성능을VR 헤드셋에더잘사용할수있습니다.
가상 현실 품질
다음팁은가상현실경험의품질을개선하는데도움이됩니다:
눈당해상도를높여이미지의품질을높일수있습니다:
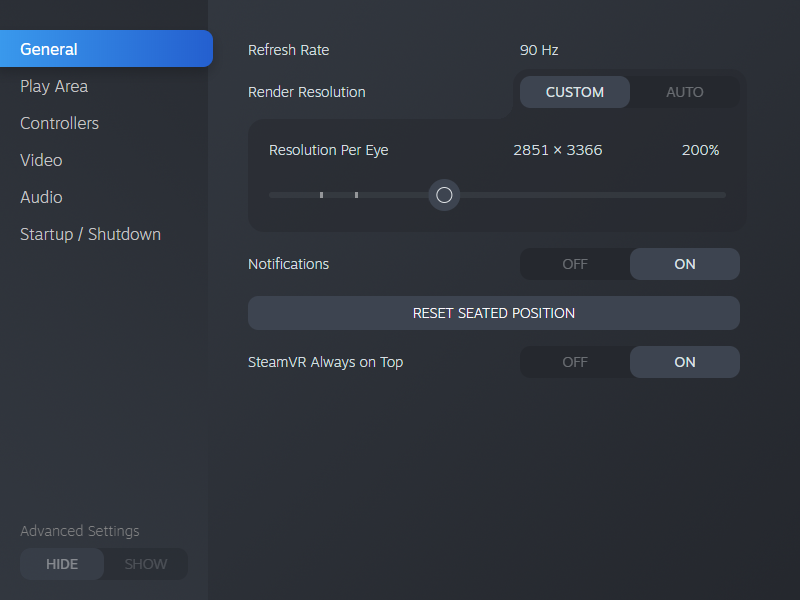
1.SteamVR에서 설정 선택
2.비디오 선택
3.눈당 해상도 200%로 증가를선택합니다.
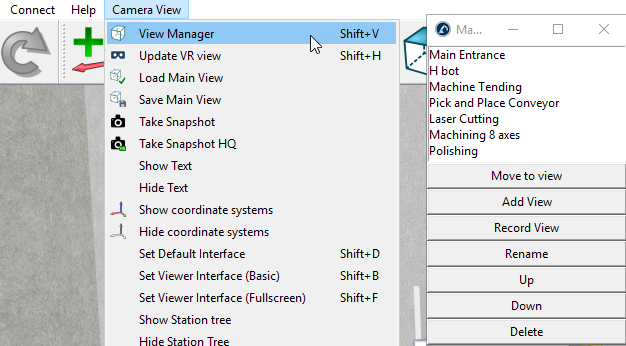
뷰 관리자
RoboDK에는뷰위치를기록하고관리할수있는앱이포함되어있습니다. VR의뷰를현재메인창에설정된뷰로이동할수도있습니다.
메타 퀘스트 헤드셋 연결하기
메타퀘스트헤드셋은기본적으로 SteamVR을사용하지않으며, 이섹션에서는 Quest Link를사용하여 Quest 2 또는 Quest 3를 SteamVR에연결하여RoboDK로퀘스트헤드셋을사용하는데필요한단계를간략하게설명합니다.
퀘스트링크는헤드셋을 PC에연결하기위한메타의솔루션입니다. 설정이쉽고무료이며모든헤드셋에포함되어있다는장점이있습니다. 고품질데이터 + 전원 USB-C 케이블을사용하여헤드셋을 PC에연결하거나 Air Link를사용하여무선환경을구축할수있습니다.
1.Oculus 데스크톱앱을설치하고지침에따라헤드셋을연결합니다. Oculus 데스크톱앱은여기에서찾을수있습니다: 퀘스트 설정: 퀘스트, 퀘스트 2, Link, Rift S 및 Rift | 메타 퀘스트 | 메타 스토어에서 찾을 수있습니다.
2.지원되는 USB-C 케이블을사용하여헤드셋을 PC에연결하거나아래지침에따라 Air Link를활성화하세요:
a.퀘스트빠른설정메뉴로이동합니다.

b.빠른설정의오른쪽상단에서 '설정'을선택합니다.
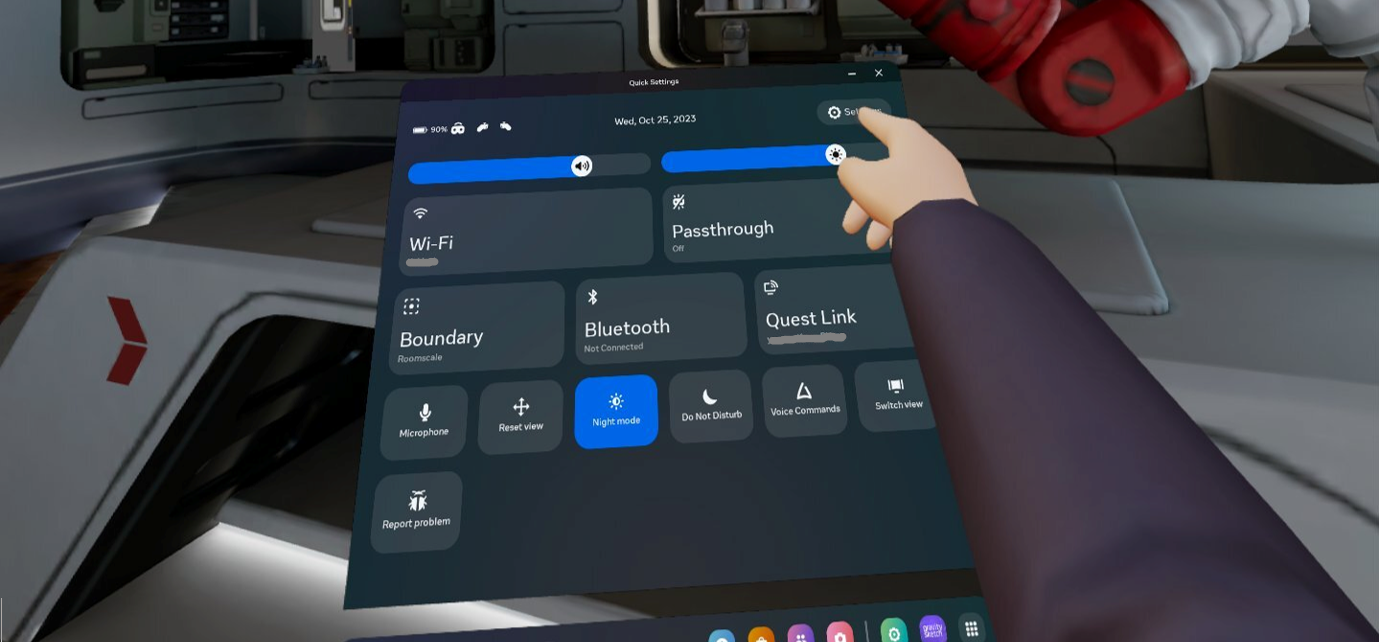
c.시스템설정으로이동합니다.
d.퀘스트링크하위메뉴로이동합니다.

e."퀘스트링크" 옵션을토글하여퀘스트링크를활성화합니다.

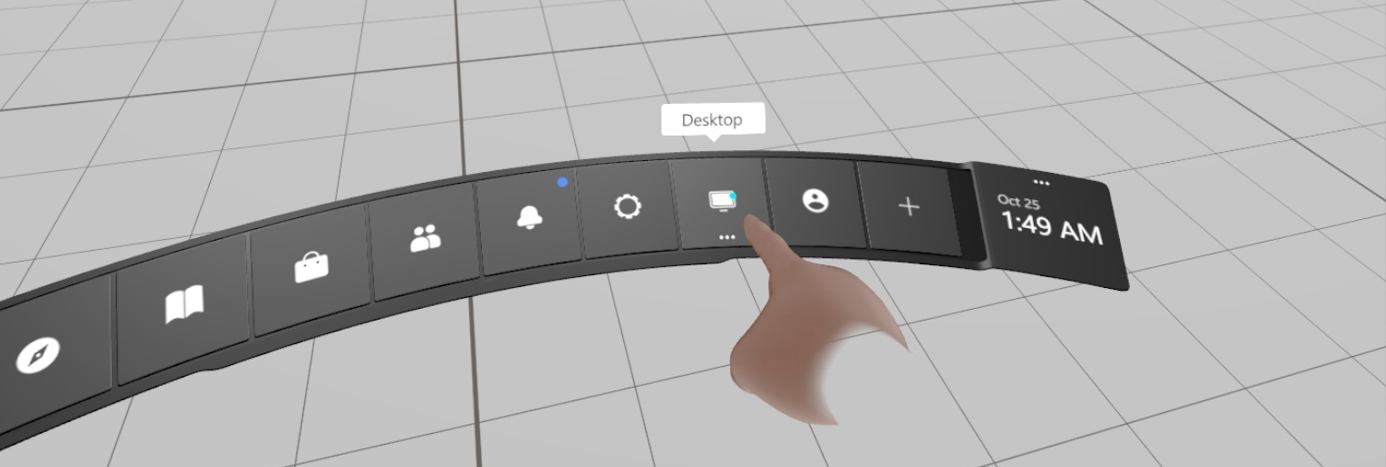
3.아래그림과같이하위메뉴또는빠른메뉴를통해퀘스트링크를실행합니다.

4.퀘스트링크메뉴에서데스크톱탭을선택하여 PC 데스크톱을엽니다.
5.RoboDK를찾아실행합니다. VR로보고싶은방송국을엽니다.

6.마지막으로 RoboDK 툴바의 "연결"에서 "VR 헤드셋연결"을선택합니다.
이렇게하면 SteamVR을통해 Quest Link가시작되며, 왼쪽메뉴버튼을누르면 SteamVR 메뉴에, 오른쪽메뉴버튼을누르면 Quest Link 메뉴에액세스할수있습니다.