Usando o controlador
Primeiro, conecte seu controlador ao dispositivo no qual você está usando o RoboDK. O Add-in mapeia movimentos e configurações específicas do robô para entradas padrão do gamepad. O mapeamento padrão foi criado para um controlador Xbox One.
Controles de movimento
Pressione o ícone Iniciar Controlador de Jogo na barra de ferramentas ou vá para Conectar-Controlador de Jogo-Iniciar Controlador de Jogo. Isso iniciará o Add-in, que tentará detectar automaticamente o controlador conectado. Clique novamente no ícone Iniciar Controlador de Jogo para interromper o Add-in.
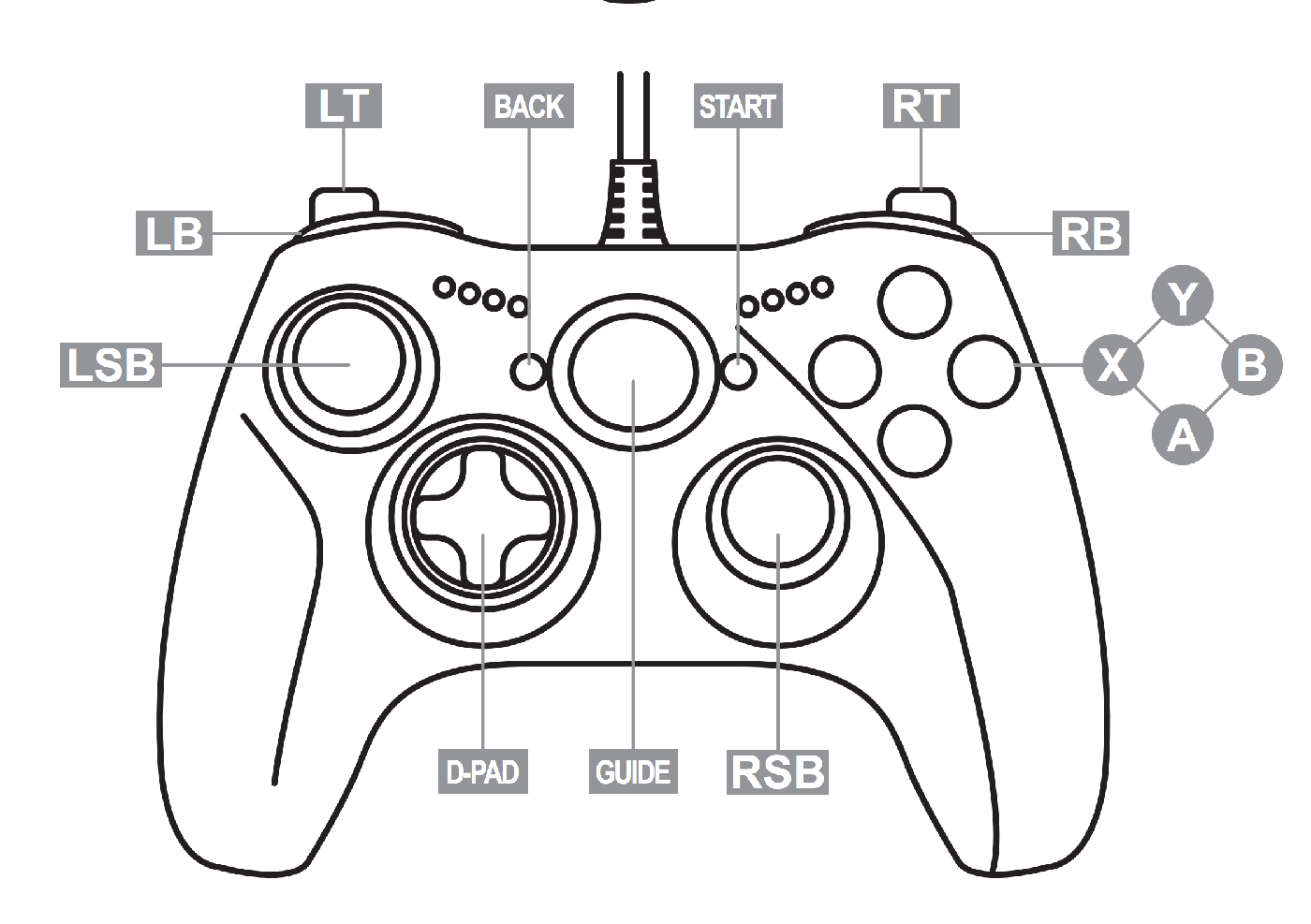
Para mover o robô, você deve selecionar um eixo e usar o D-pad para aplicar o movimento.
1.Selecionar o eixo X: Pressione e mantenha pressionado o botão X no seu controle.
2.Selecionar o eixo Y: Pressione e mantenha pressionado o botão Y no seu controle.
3.Selecionar o eixo Z: Pressione e mantenha pressionado o botão B no seu controle.
4.Mover: Enquanto mantém pressionado um botão de eixo, use o direcional para cima ou para baixo para mover o robô ao longo do eixo selecionado.
Botões de alternância
O add-in Game Controller oferece alguns botões de alternância para personalizar o comportamento.
Outras opções para manipular o movimento do seu robô incluem:
1.Translação vs. Rotação: Pressione o botão do joystick esquerdo (LSB) para alternar entre mover o robô linearmente (mm) ou girá-lo (deg). Usamos a translação (mm) por padrão.
2.MoveJ vs. MoveL: Pressione o botão do joystick direito (RSB) para alternar entre movimento de articulação (MoveJ) e movimento linear (MoveL). A instrução de movimento padrão é MoveJ.
3.Tamanho do passo: Use o D-pad para a esquerda ou para a direita para diminuir ou aumentar o incremento do passo de movimento.
4.Posição inicial: Pressione ambos os botões de ombro (LB + RB) simultaneamente enquanto aciona a proteção para retornar o robô à sua posição inicial.