Game Controller
Introdução ao Add-in do Controlador de Jogos
O Add-in para controlador de jogos do RoboDK é uma ferramenta eficiente projetada para permitir que você controle manualmente um robô usando um gamepad padrão (como um controle de Xbox). Este Add-in é ideal para ensinar alvos rapidamente, testar a acessibilidade do robô ou demonstrar movimentos do robô em um ambiente simulado ou real.
Instalação
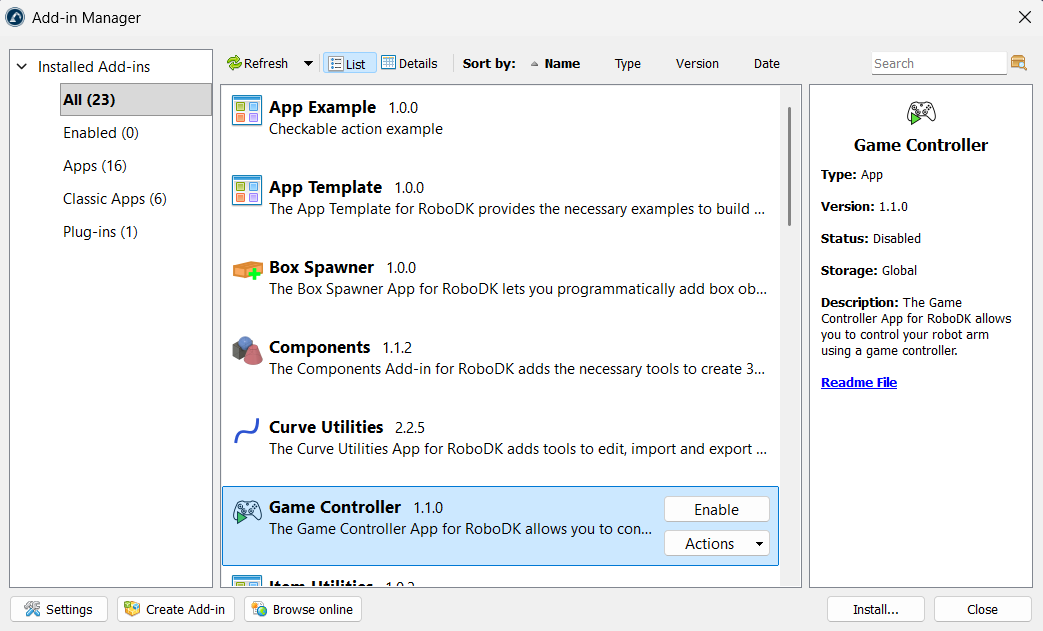
Você pode instalar o Add-in Controlador de Jogos a partir da Biblioteca Online do RoboDK. Outra maneira de fazer isso diretamente no software RoboDK é acessando Ferramentas > Gerenciador de Suplementos e ativando o Add-in Controlador de Jogos.
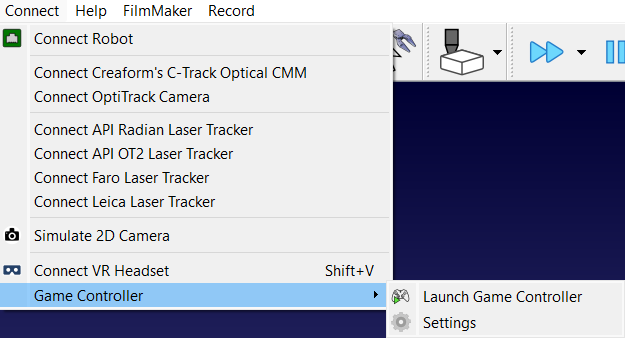
Após a instalação, as opções do Controlador de Jogos podem ser encontradas no menu Conectar. Você também pode encontrar o ícone Iniciar Controlador de Jogos na barra de ferramentas.
Usando o controlador
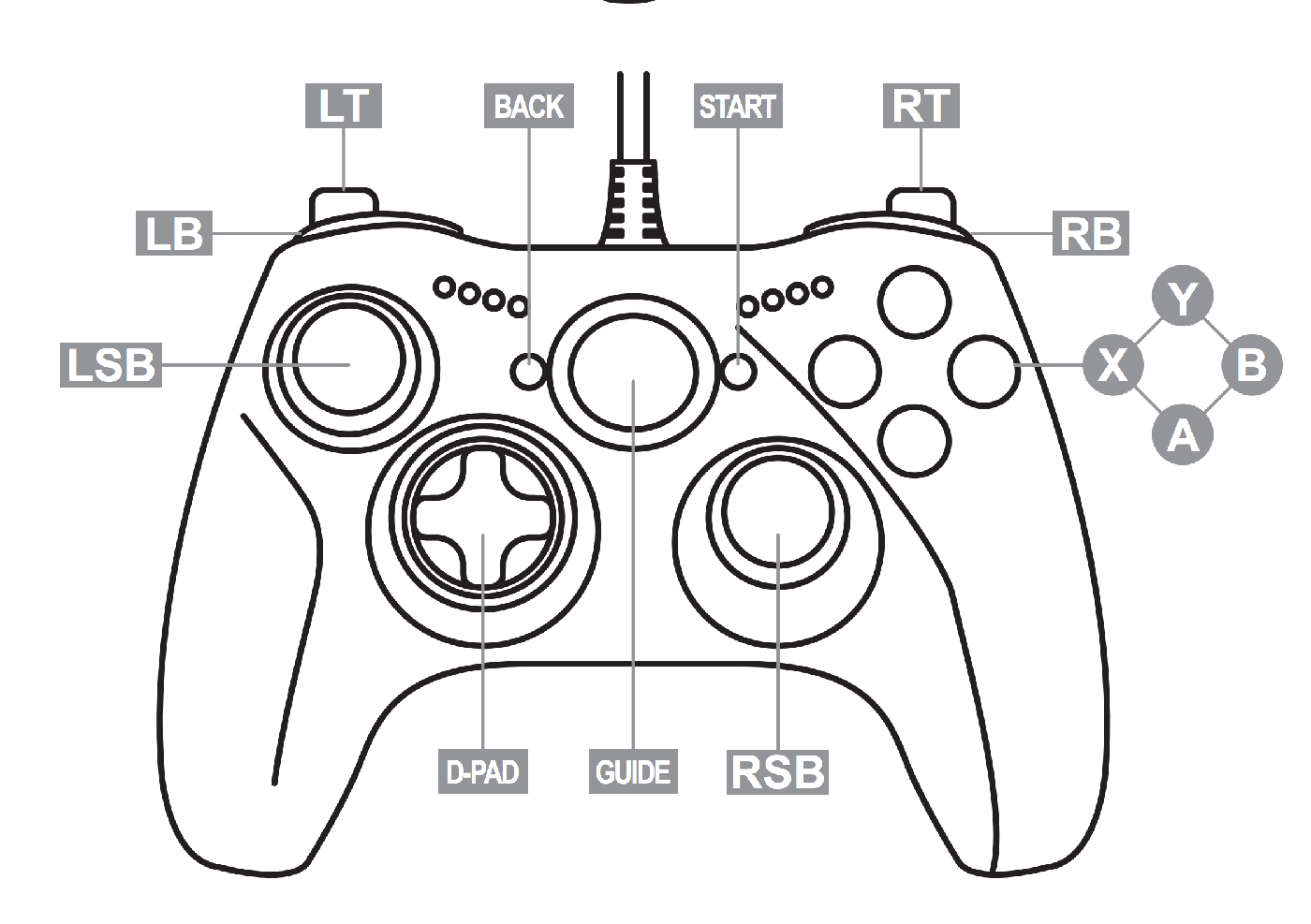
Primeiro, conecte seu controlador ao dispositivo no qual você está usando o RoboDK. O Add-in mapeia movimentos e configurações específicas do robô para entradas padrão do gamepad. O mapeamento padrão foi criado para um controlador Xbox One.
Controles de movimento
Pressione o ícone Iniciar Controlador de Jogo na barra de ferramentas ou vá para Conectar-Controlador de Jogo-Iniciar Controlador de Jogo. Isso iniciará o Add-in, que tentará detectar automaticamente o controlador conectado. Clique novamente no ícone Iniciar Controlador de Jogo para interromper o Add-in.
Para mover o robô, você deve selecionar um eixo e usar o D-pad para aplicar o movimento.
1.Selecionar o eixo X: Pressione e mantenha pressionado o botão X no seu controle.
2.Selecionar o eixo Y: Pressione e mantenha pressionado o botão Y no seu controle.
3.Selecionar o eixo Z: Pressione e mantenha pressionado o botão B no seu controle.
4.Mover: Enquanto mantém pressionado um botão de eixo, use o direcional para cima ou para baixo para mover o robô ao longo do eixo selecionado.
Botões de alternância
O add-in Game Controller oferece alguns botões de alternância para personalizar o comportamento.
Outras opções para manipular o movimento do seu robô incluem:
1.Translação vs. Rotação: Pressione o botão do joystick esquerdo (LSB) para alternar entre mover o robô linearmente (mm) ou girá-lo (deg). Usamos a translação (mm) por padrão.
2.MoveJ vs. MoveL: Pressione o botão do joystick direito (RSB) para alternar entre movimento de articulação (MoveJ) e movimento linear (MoveL). A instrução de movimento padrão é MoveJ.
3.Tamanho do passo: Use o D-pad para a esquerda ou para a direita para diminuir ou aumentar o incremento do passo de movimento.
4.Posição inicial: Pressione ambos os botões de ombro (LB + RB) simultaneamente enquanto aciona a proteção para retornar o robô à sua posição inicial.
Recursos de segurança
O add-in inclui um mecanismo de proteção obrigatório para evitar movimentos acidentais.
Os movimentos acidentais incluem o seguinte:
1.Acionamento da proteção: Você deve pressionar e manter pressionado o gatilho direito (RT) para permitir qualquer movimento do robô. Se o gatilho for solto, o robô não se moverá e a App exibirá a seguinte mensagem:
Por favor, pressione o gatilho de segurança!
2.Aviso de configuração: O Script verifica se o novo movimento causa uma alteração na configuração do robô (por exemplo, rotação do pulso). Se for detectada uma alteração, o movimento é bloqueado e o seguinte aviso é exibido para evitar comportamentos inesperados:
A configuração do robô foi alterada. Isso pode levar a movimentos inesperados! Por favor, mova o robô através do RoboDK ou tente outro comando.
3.Verificação de acessibilidade: O sistema valida o movimento usando Cinemática Inversa (IK). Se o alvo estiver fora de alcance ou próximo a uma singularidade, as seguintes mensagens serão exibidas:
Alvo inacessível. Tente usar MoveJ ou outro comando.
Sem solução para o robô! A nova posição está muito distante, fora de alcance ou próxima a uma singularidade.
Manuseio de dispositivos e robôs
O add-in inclui lógica para gerenciar vários dispositivos ou robôs dentro da estação:
1.Vários controladores: Se mais de um controlador estiver conectado ao PC, o Add-in exibirá uma mensagem indicando que vários controladores foram encontrados e, por padrão, utilizará o primeiro detectado.
2.Vários robôs: Se a estação contiver mais de um robô, o Add-in solicitará que o usuário “Selecione um robô” a partir de uma lista. Se houver apenas um robô presente, ele será selecionado automaticamente sem solicitar a confirmação do usuário.
Simulação vs. Robô Real
O add-in pode ser utilizado tanto para simulação offline quanto para controle de robôs em tempo real:
1.Modo de simulação: O modo padrão para testar movimentos com segurança dentro da estação RoboDK.
2.Modo Robô Real: Para controlar um robô físico, conecte-o via Connect-Connect Robot. O Add-in perguntará se você deseja executar no robô real em vez de permanecer no modo de simulação. Ao clicar em Sim, ele solicitará que você insira o IP do robô; em seguida, você poderá clicar em Conectar.
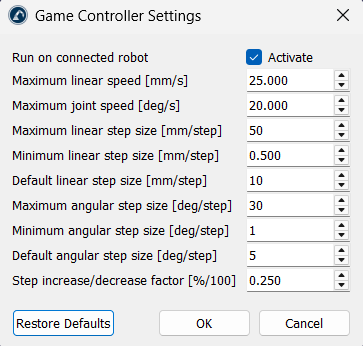
Configurações
Você pode encontrar configurações adicionais para personalização em Conectar-Controlador de Jogo-Configurações.