IsaacSim Bridge Add-in
O Add-in IsaacSim Bridge para RoboDK permite ao usuário conectar sua cena IsaacSim ao RoboDK, simplificando a conexão com um robô real ou gerando programas de robôs com base em suas necessidades. A extensão IsaacSim também implementa o RRT Motion Planner para facilitar a exportação de uma trajetória sem colisões do IsaacSim para um programa RoboDK.
O RoboDK adiciona recursos de pós-processamento a robôs industriais no Isaac Sim, gerando programas de robôs prontos para produção para 1.200 robôs industriais de 80 marcas diferentes.
Instale o
É necessário instalar o Add-in Isaac Sim Bridge a partir da biblioteca de Add-ins. O Add-in IsaacSim Bridge não está habilitado por padrão no software RoboDK.
Para instalar a extensão no IsaacSim, é necessário primeiro instalar os módulos da API Python do RoboDK. Para isso, siga estas etapas:
1.Abra o IsaacSim Selector.
2.Clique em Abrir no terminal.
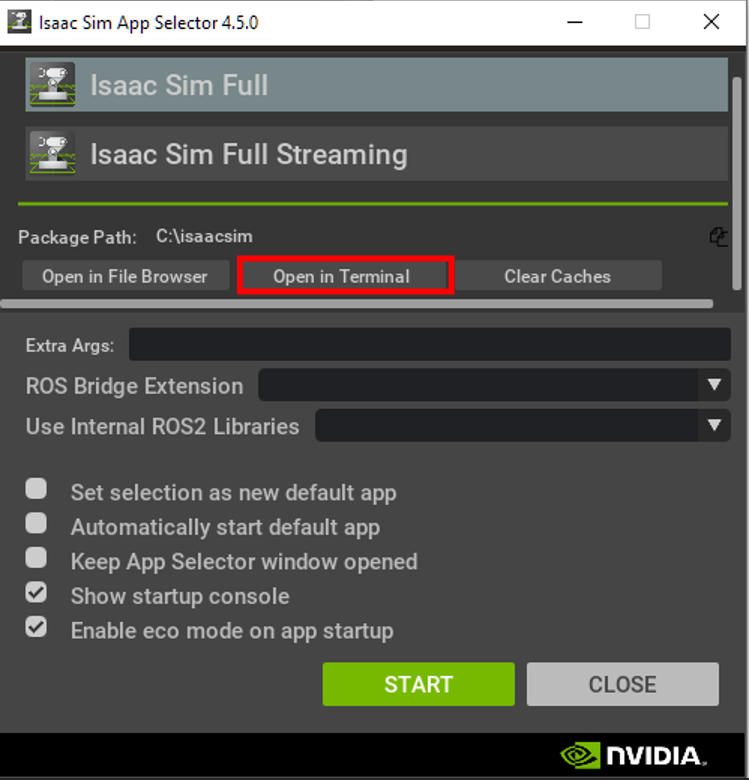
Execute o seguinte comando: pip install RoboDK
Após instalar o Pacote RoboDK, você poderá instalar a extensão no IsaacSim seguindo estas etapas.
1.Instale o Add-in no RoboDK.
2.Abra o local do Add-in no seu gerenciador de arquivos.
3.Copie a pasta RoboDK.Bridge. Ela contém a extensão para o IsaacSim.
4.Cole-a dentro da pasta extsUser na sua instalação do IsaacSim.
5.Inicie o IsaacSim e abra o gerenciador de extensões.
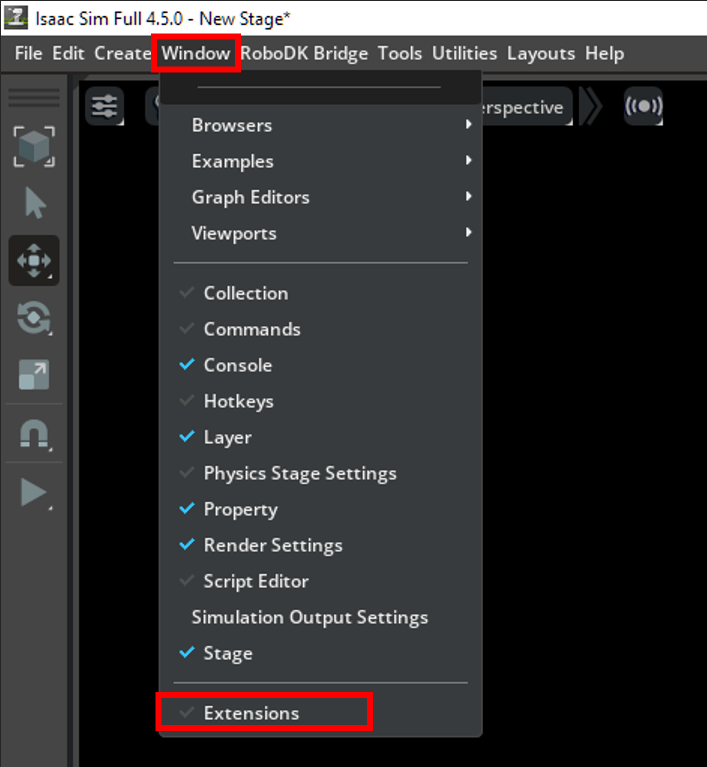
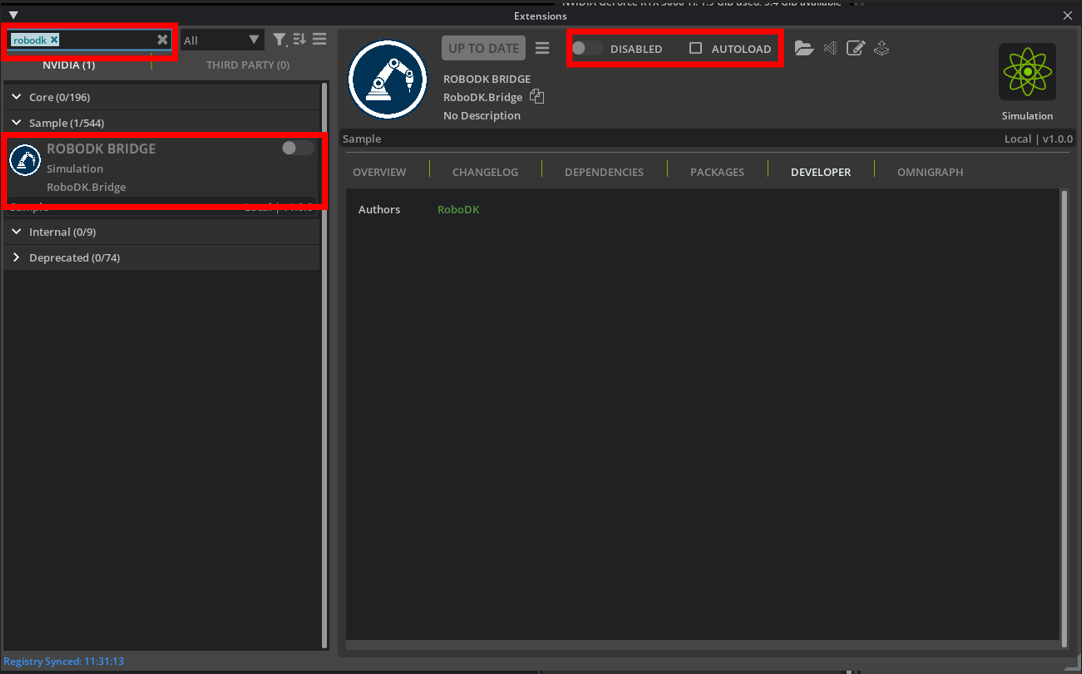
6.Procure por RoboDK na barra de pesquisa.
7.Habilite a extensão e, opcionalmente, ative o carregamento automático.
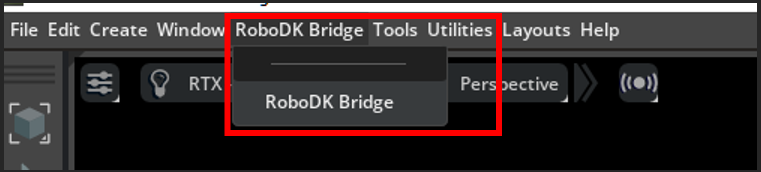
8.A RoboDK Bridge deverá aparecer na barra de ferramentas do IsaacSim e poderá ser aberta.
Funções do IsaacSim Bridge
Esta seção mostra as funções básicas do Add-in IsaacSim Bridge no IsaacSim.
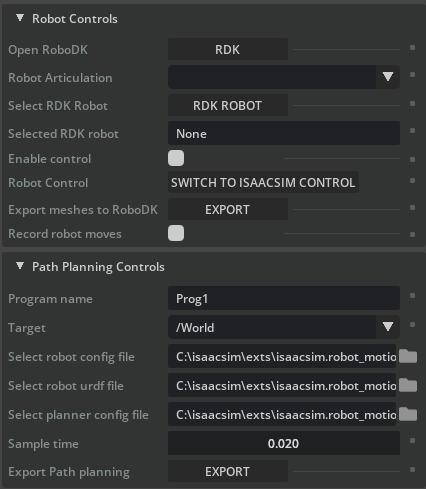
A janela da extensão IsaacSim Bridge contém os seguintes elementos funcionais:
1.Controles do robô
a.Abrir RoboDK: abre o RoboDK se ele não estiver aberto ou conecta-se à instância do RoboDK atualmente em execução, se estiver. Isso é necessário para que a extensão funcione.
b.Articulação do robô: selecione a articulação dentro do IsaacSim a ser utilizada.
c.Selecionar robô RDK: Selecione o robô na estação RoboDK a ser utilizado.
d.Robô RDK selecionado: Imprime o nome do robô selecionado.
e.Ativar controle: ativa a comunicação do robô entre a cena do IsaacSim e a estação RoboDK.
f.Controle do robô: Selecione o robô de referência que deve ser usado como o robô a ser combinado. Se a opção exibir Alternar para o controle do IsaacSim, o RoboDK atuará como mestre e a articulação do robô no IsaacSim seguirá a pose do robô RoboDK selecionado.
g.Exportar malhas para o RoboDK: Converta objetos de malha na cena do IsaacSim em arquivos de malha 3D e carregue-os na estação RoboDK. A origem do objeto convertido estará na base da estação, mas será deslocada para que a localização atual corresponda à sua localização na cena do IsaacSim. Cada um dos objetos de malha do IsaacSim será seu próprio objeto na estação RoboDK e poderá ser movido.
h.Gravar movimentos do robô: grava todos os movimentos realizados pelo robô IsaacSim e os adiciona a um programa dentro do RoboDK. Isso é útil se você tiver um programa dentro do IsaacSim que deseja exportar para o RoboDK.
2.Controles de planejamento de trajetória
a.Nome do programa: nome do programa a ser usado ao exportar para o RDK.
b.Alvo: Menu suspenso de XForms a ser usado como alvo para o planejador de trajetória RRT.
c.Selecionar arquivo de configuração do robô: Selecione o arquivo de configuração do robô a ser usado para o planejamento de trajetória. O formato do arquivo deve ser yaml.
d.Selecionar arquivo urdf do robô: Selecione o arquivo de definição do robô a ser usado para o planejamento de trajetória. O formato do arquivo deve ser urdf.
e.Selecionar arquivo de configuração do planejador: Selecione o arquivo de configuração do planejador a ser utilizado para o planejamento de trajetória. O formato do arquivo deve ser yaml.
f.Tempo de amostragem: Selecione o tempo de amostragem a ser utilizado ao gerar a trajetória. Um tempo de amostragem mais curto resultará em mais instruções MoveJ no programa, com passos menores entre elas.
g.Exportar planejamento de trajetória: Utiliza RRT para calcular uma trajetória entre a pose atual do robô e o alvo selecionado e criar um programa de robô com uma lista de instruções que completam a trajetória.