Mesa giratória (3x)
Você pode criar um posicionador de 3 eixos especificando parâmetros como raio do flange, deslocamentos laterais e horizontais, altura e cores para a base, a coluna e os flanges.
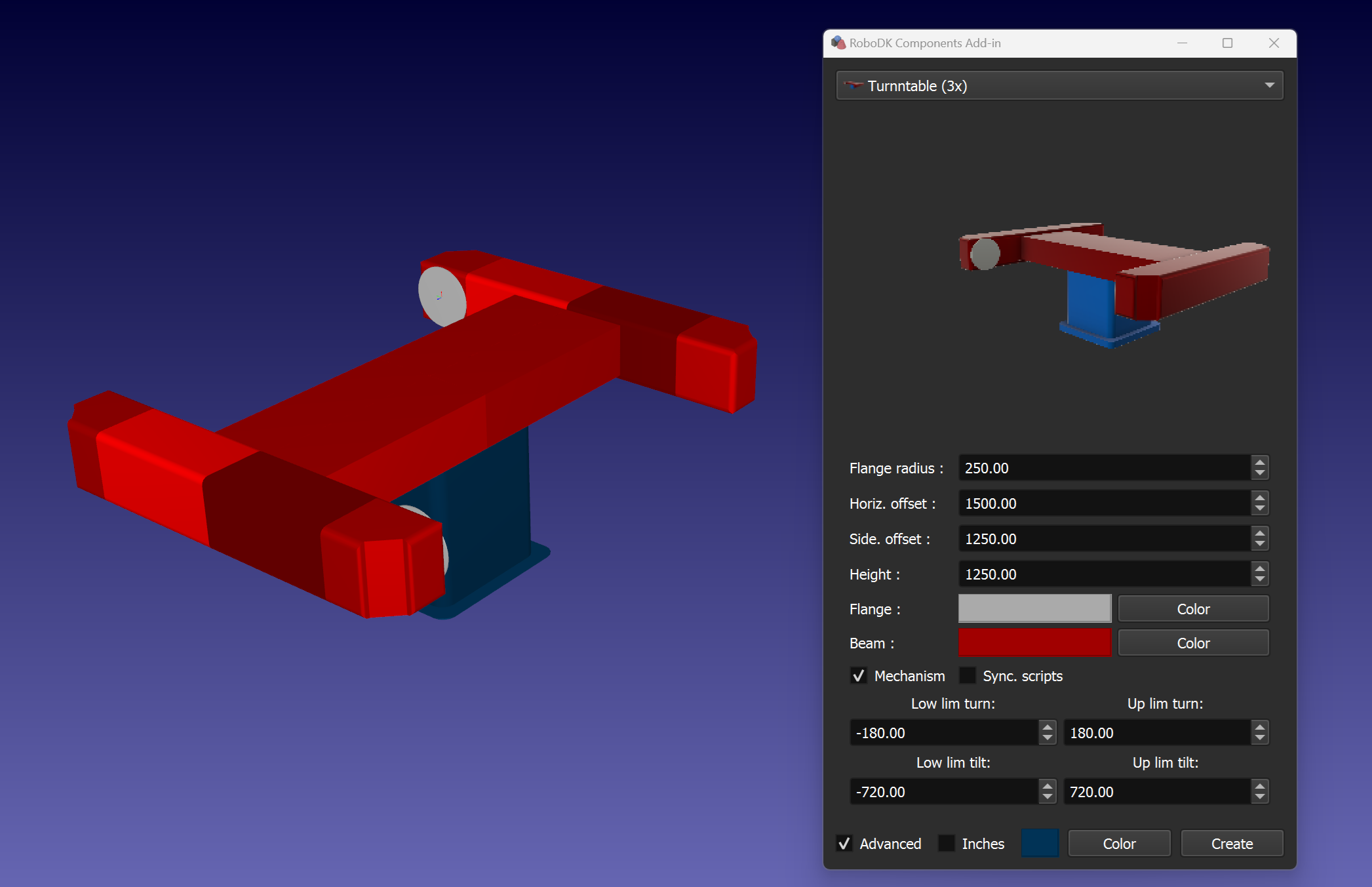
Dica: Use a caixa de seleção Mecanismo para criar um mecanismo posicionador de 3 eixos. Além disso, você pode definir os limites de movimento com os parâmetros correspondentes.
Dica: Use a caixa de seleção Sinc. scripts para criar scripts Python adicionais que sincronizarão o robô com o eixo horizontal necessário executando o script correspondente.
Observação: por padrão, C:\RoboDK\Addins\com.robodk.app.shape\Components\scripts\ é a pasta que contém os exemplos de scripts de sincronização.