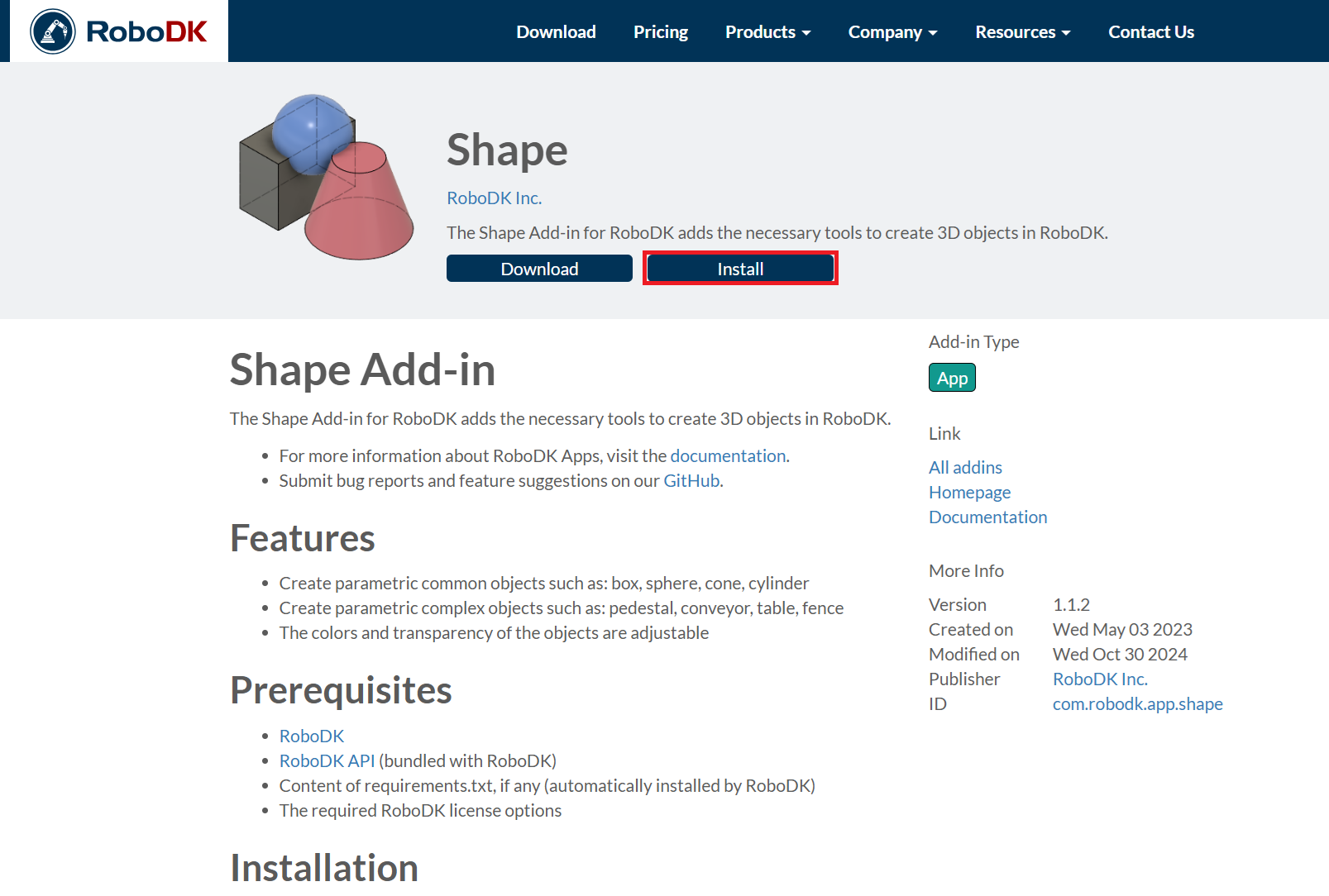
O Add-In Componentes do RoboDK adiciona as ferramentas necessárias para criar componentes visuais (objetos e mecanismos 3D) no software RoboDK.
O Add-In Componentes do RoboDK também permite que você defina dimensões e parâmetros de configuração para os componentes que criar. Uma visualização está disponível para verificar se o resultado está correto
Você pode definir qualquer cor e transparência para os componentes que pretende criar.
Esta seção mostra as funções básicas do Add-In Componentes.
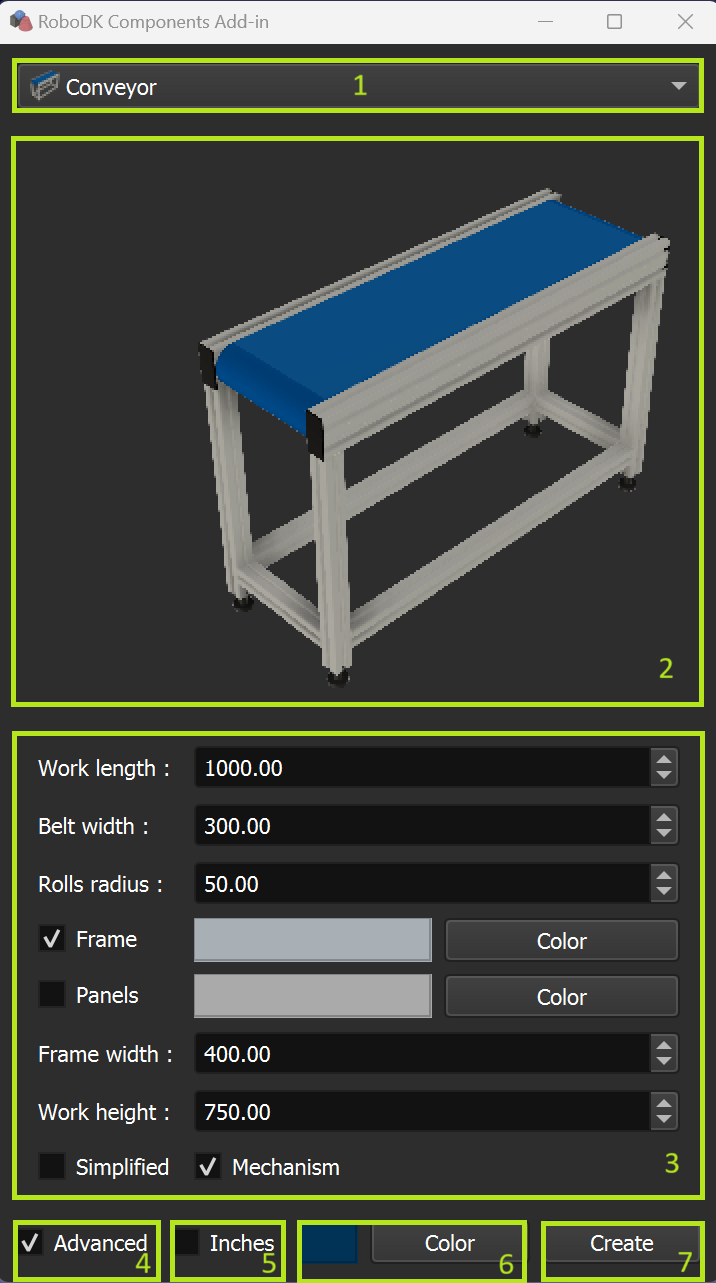
A janela Add-In Componentes contém os seguintes elementos funcionais:
1.Área de listagem para a seleção de componentes
2.Esboço do componente
3.Área de parâmetros do componente selecionado
4.Caixa de seleção de visibilidade das opções avançadas
5.Caixa de seleção para usar polegadas (milímetros são usados por padrão)
6.Seleção de cores e transparência
7.Criação de componentes
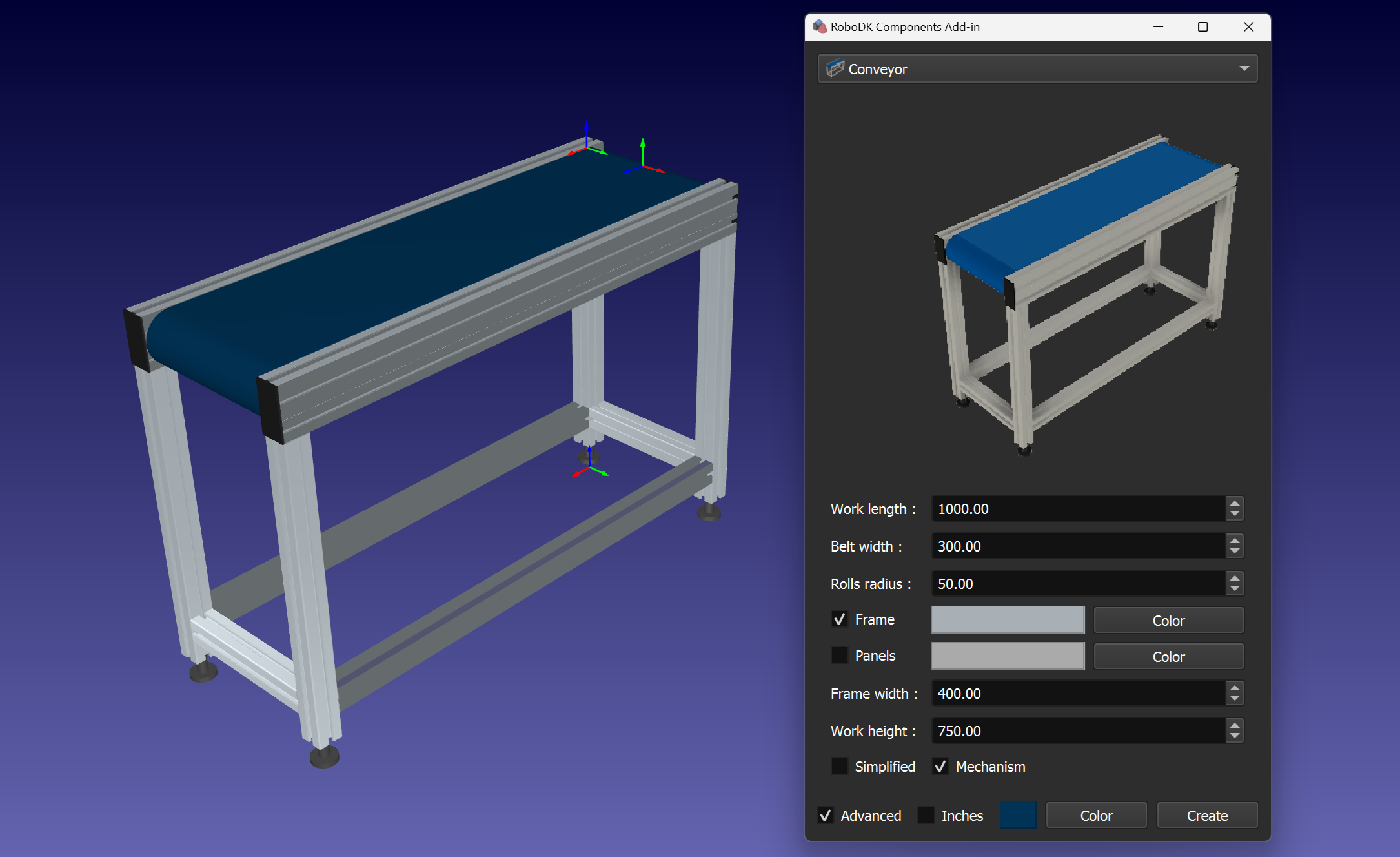
Transportador
Você pode criar um transportador especificando as dimensões do transportador.
Dica: Use a caixa de seleção Estrutura com os valores de tamanho apropriados e a caixa de diálogo Color para adicionar uma moldura de transportador.
Dica: Use a caixa de seleção Painéis e a caixa de diálogo Cor correspondente para adicionar os painéis da moldura com a cor e a transparência especificadas.
Dica: use a caixa de seleção Simplificado para alternar entre o quadro simplificado e o realista.
Dica: use a caixa de seleção Mecanismo para criar um mecanismo de transporte.
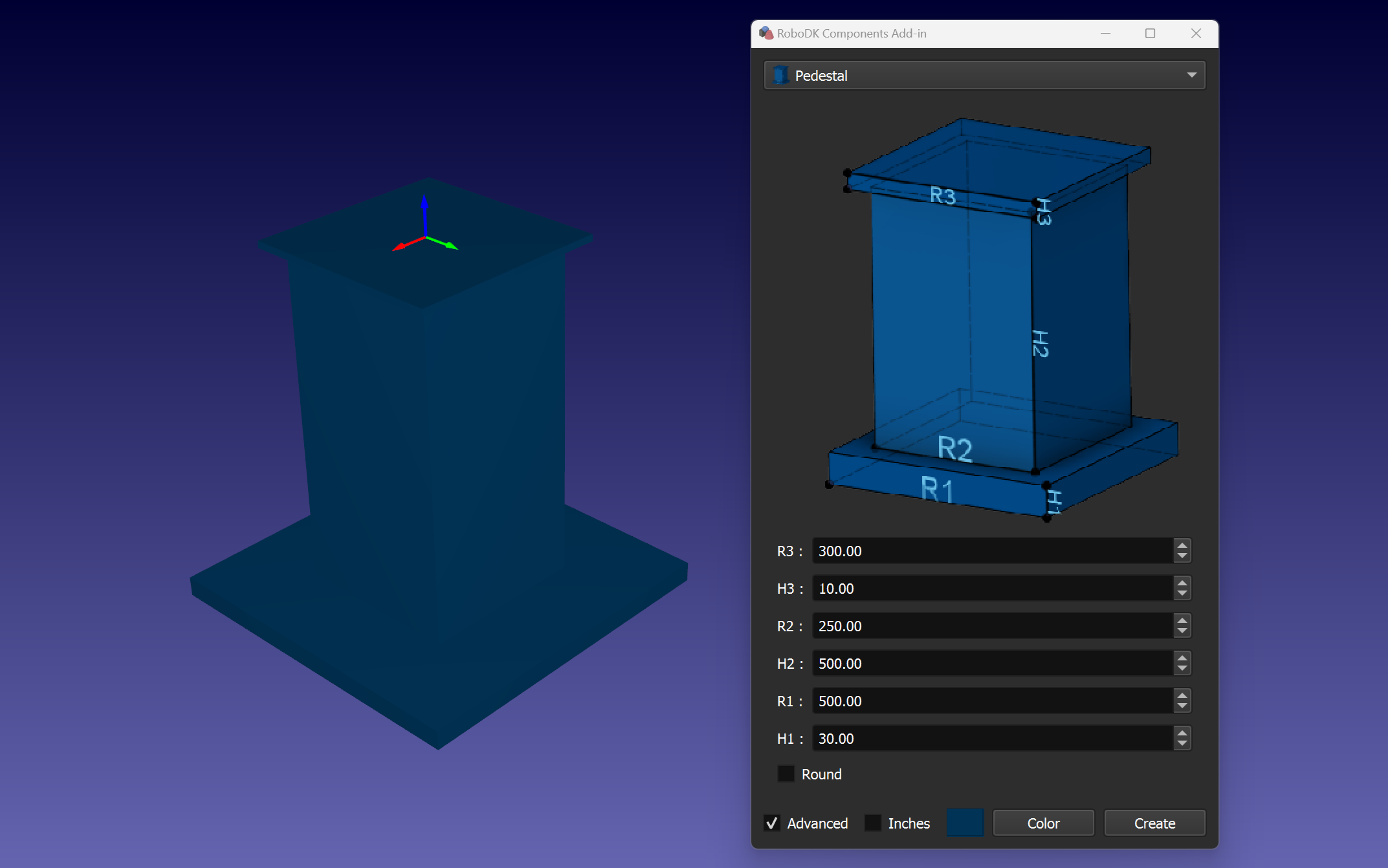
Pedestal
Você pode criar um pedestal especificando as dimensões (R1, R2, R3, H1, H2, H3).
Dica: use a caixa de seleção Arredondar para criar uma base cilíndrica.
Dica: Um quadro criado adicionalmente chamado Pedestal N Plane Frame pode ser útil para colocar os objetos necessários no centro do plano superior do porão.
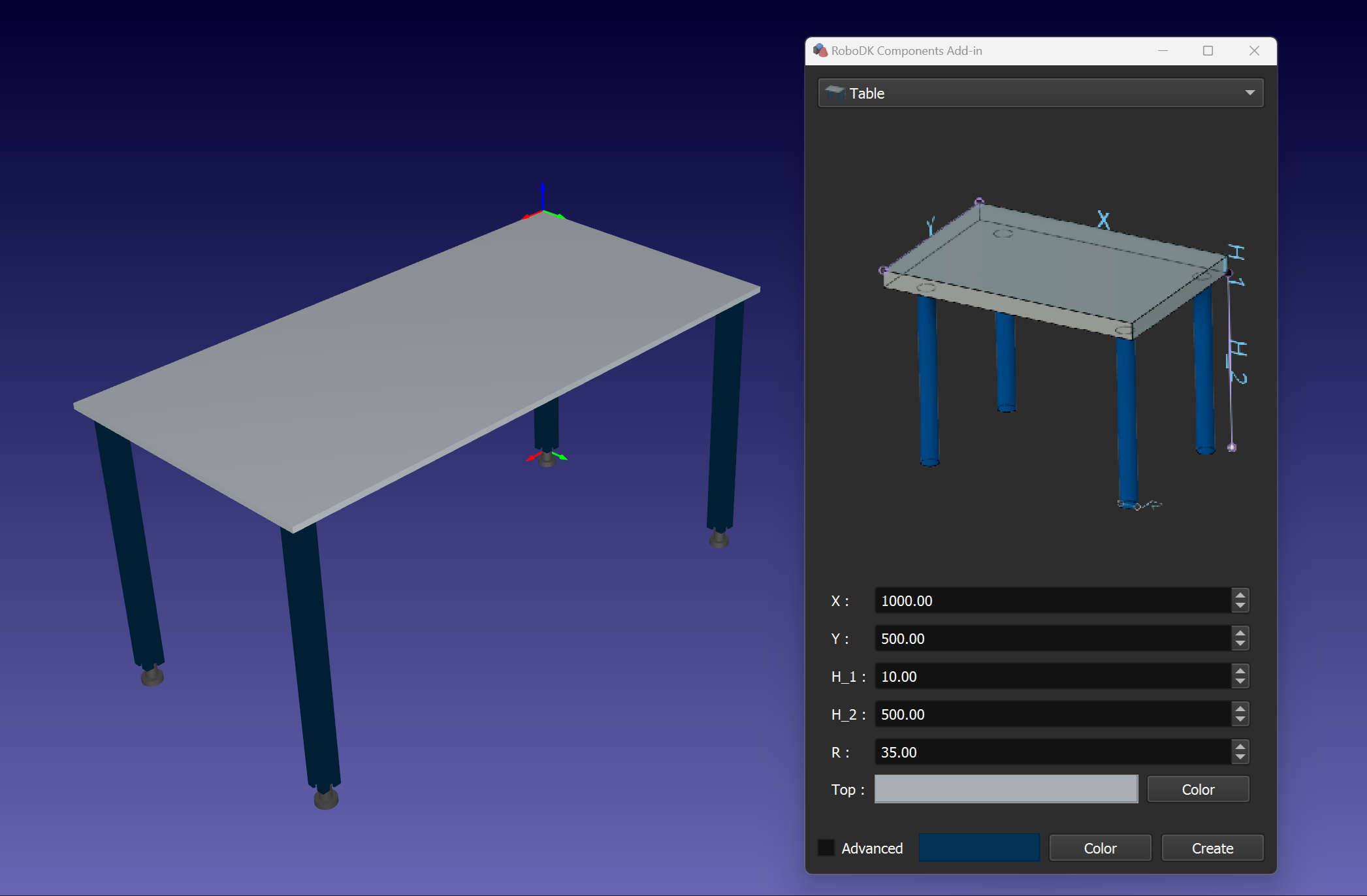
Mesa
Você pode criar uma mesa especificando as dimensões (X, Y, R, H1, H2).
Dica: use a caixa de diálogo Cor para definir a cor e a transparência da superfície superior da mesa.
Dica: Uma moldura criada adicionalmente, chamada Mesa N Plano Estrutura, pode ser útil para colocar os objetos necessários na superfície superior da mesa.
Dica: use a caixa de seleção Simplificar para alternar entre pernas de mesa simplificadas e realistas.
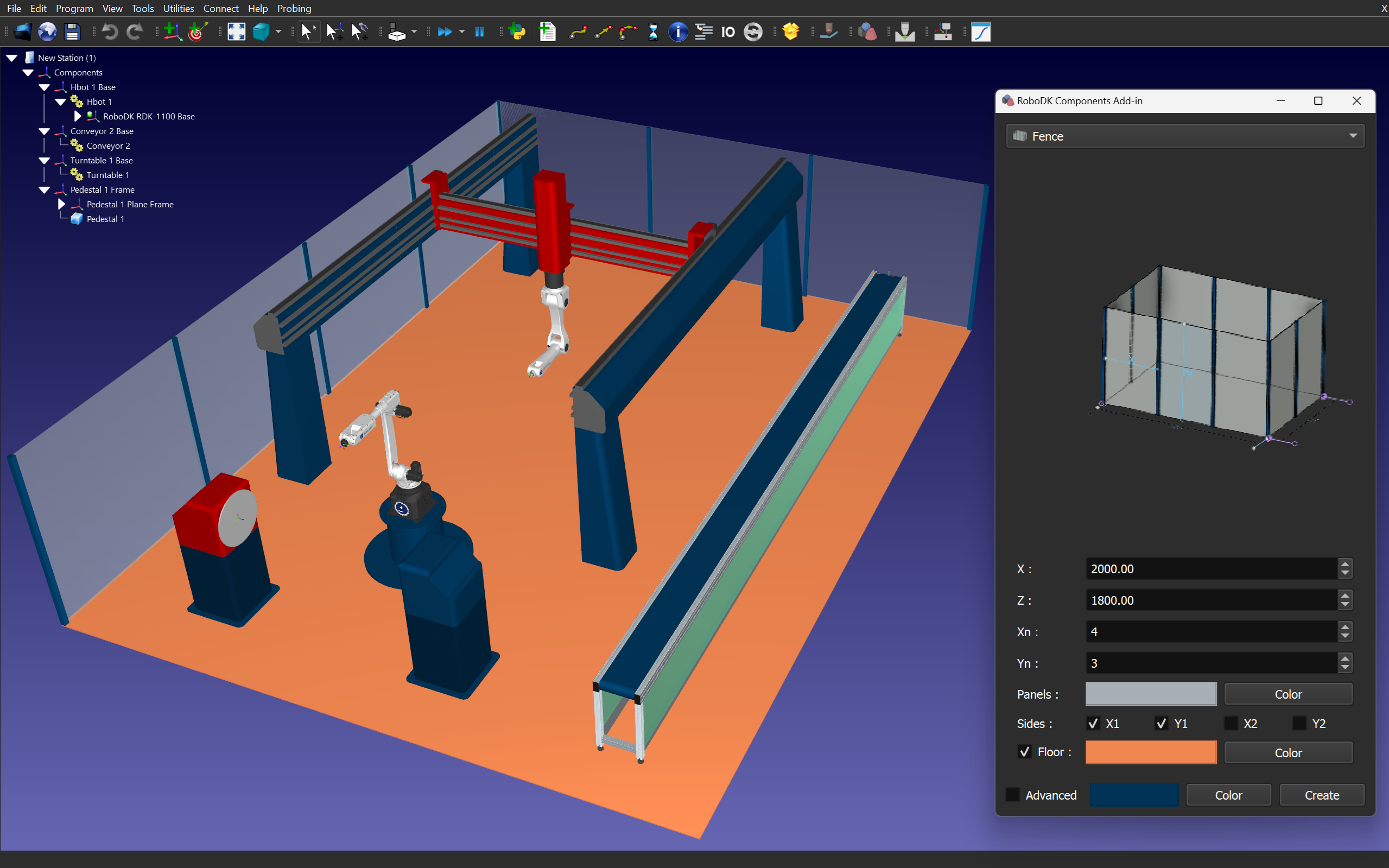
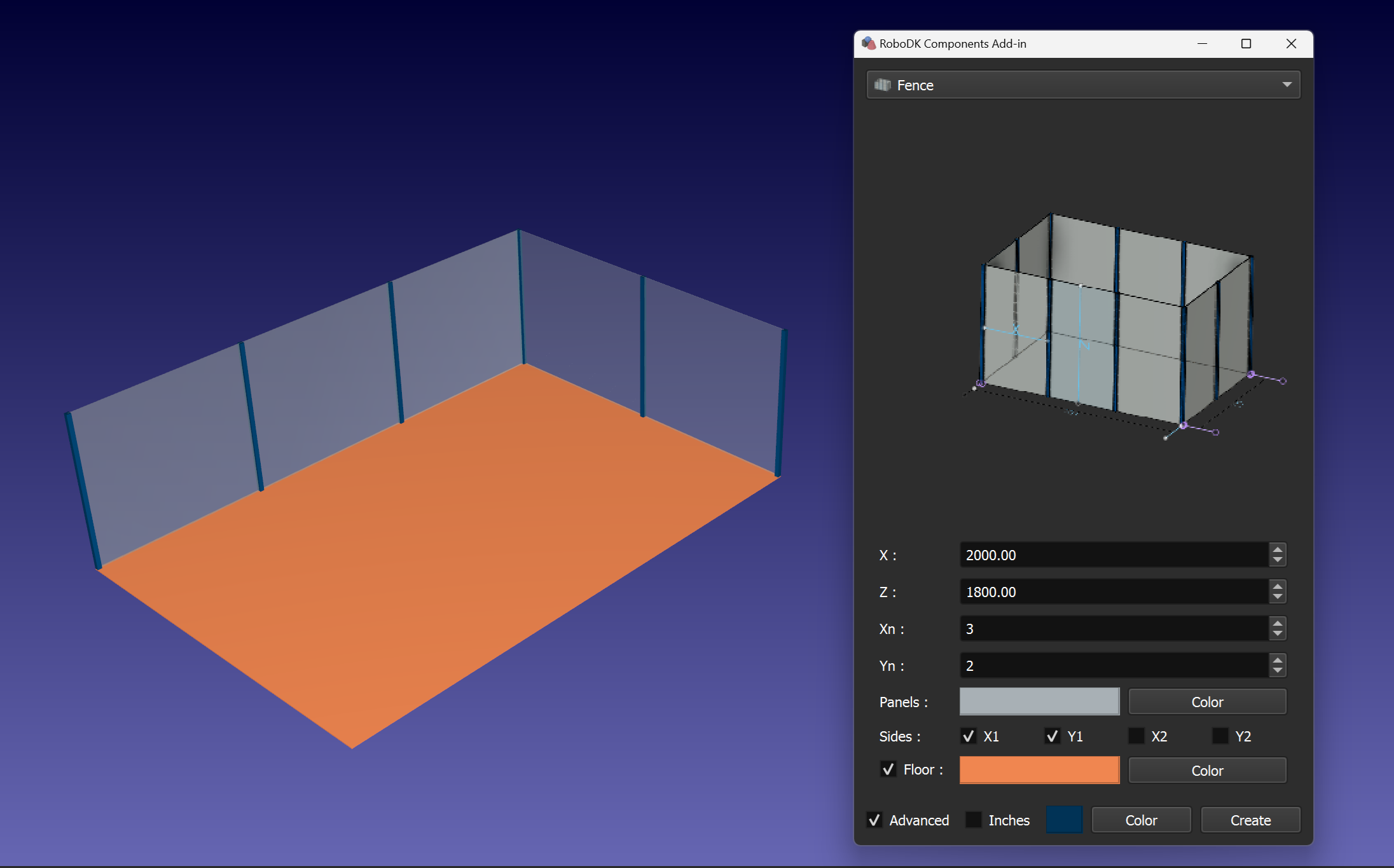
Cerca
É possível criar uma cerca especificando as dimensões dos painéis (X, Z) e o número de seções (Xn, Yn).
Dica: Use a caixa de diálogo Cor para definir a cor e a transparência dos painéis da cerca.
Dica: Use a caixa de seleção Piso e a caixa de diálogo Cor correspondente para adicionar o piso com a cor e a transparência especificadas.
Dica: Você pode alterar a configuração da cerca operando as caixas de seleção X1, X2, Y1 e Y2.
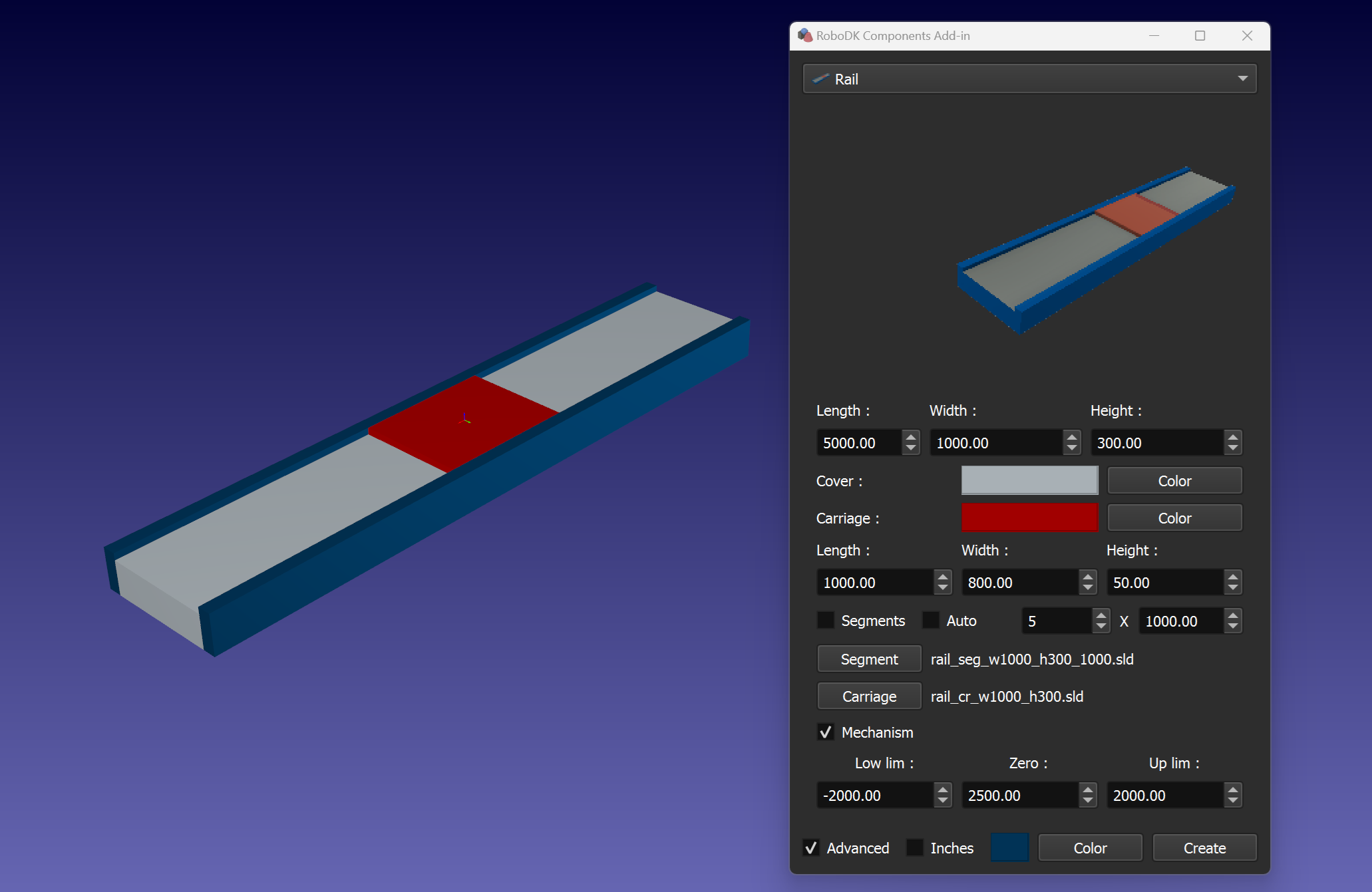
Trilho
Você pode criar um trilho especificando parâmetros como comprimento, largura, altura e cor para a base e o carro do trilho.
Dica: Você pode criar um trilho segmentado usando modelos dos segmentos de base e do carro. É necessário definir os arquivos de modelo correspondentes usando os botões Segmento e Carro. Certifique-se de usar os valores corretos de dimensão e o número correto de segmentos. Use a caixa de seleção Segmentos para criar o modelo de trilho correspondente.
Dica: use a caixa de seleção Mecanismo para criar um mecanismo de trilho. Além disso, você pode definir os limites de movimento e a posição zero do carro com os parâmetros correspondentes.
Observação: Verifique o deslocamento dos segmentos e os modelos de carro caso a opção Segmentos seja usada. Há vários exemplos na pasta Models. Por padrão, a pasta com exemplos de modelos é C:\RoboDK\Addins\com.robodk.app.shape\Components\models\rail\.
Dica: Use a caixa de seleção Auto para definir parâmetros com base nas medições da caixa delimitadora do modelo. Pequenos detalhes do modelo podem afetar o resultado da medição. Você pode desmarcar a opção Auto após a medição e definir os parâmetros manualmente.
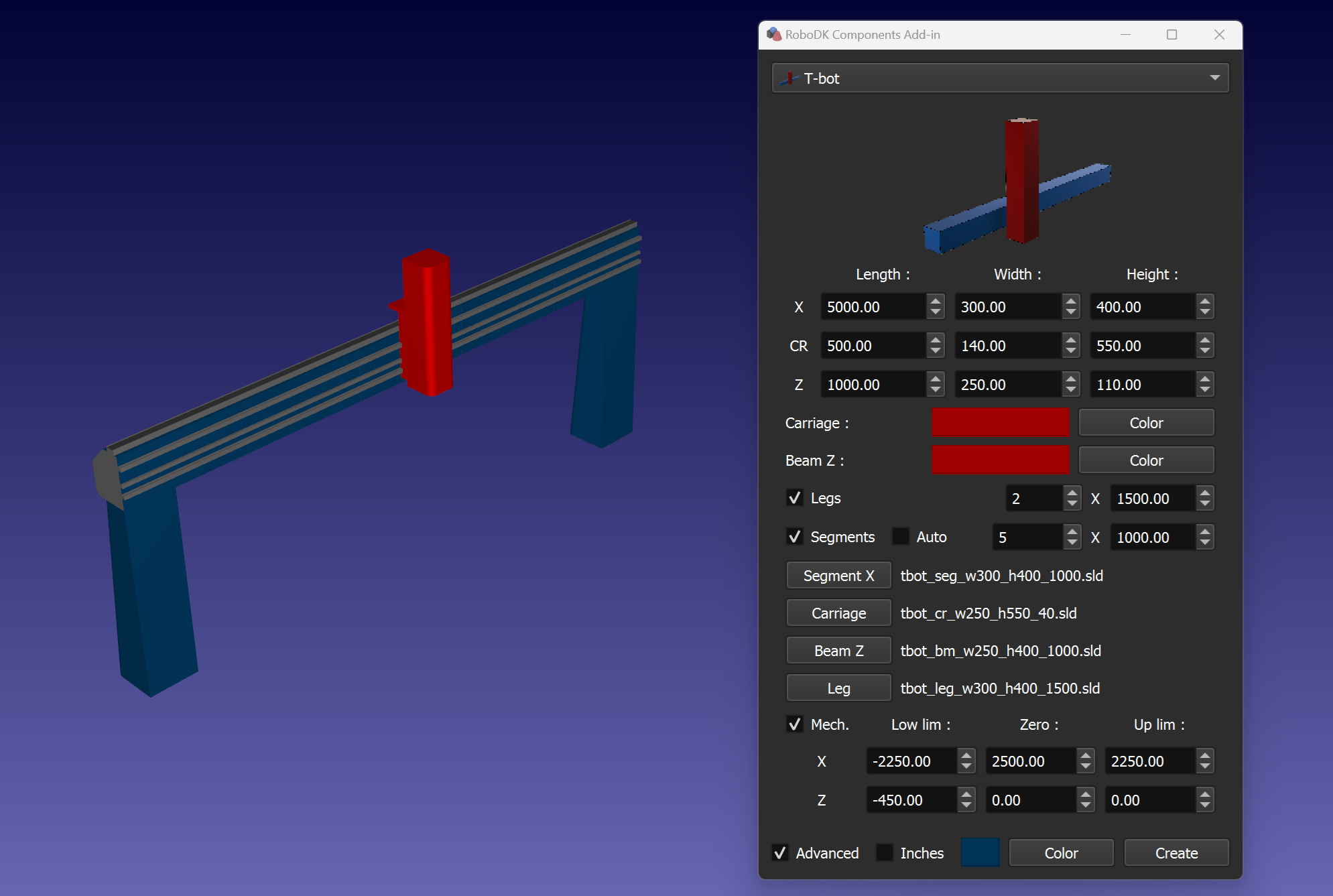
Robô T
Você pode criar um Robô T paramétrico definindo parâmetros para o coluna X, o carro e o coluna Z.
Dica: Você pode criar um Robô T com uma Coluna X segmentada usando os modelos Segmento, Coluna Z e Carro. É necessário definir os arquivos de modelo apropriados usando os botões Segmento X, Carro e Coluna Z. Certifique-se de usar os valores corretos de dimensão e o número correto de segmentos. Use a caixa de seleção Segments (Segmentos) para criar o modelo Robô T apropriado.
Dica: Use a caixa de seleção Mecanismo para criar um mecanismo Robô T. Além disso, você pode definir os limites de movimento e a posição zero dos eixos com os parâmetros correspondentes.
Observação: Verifique o deslocamento dos modelos de segmentos, Coluna e carro caso a opção Segmentos seja usada. Há vários exemplos na pasta Modelos. Por padrão, a pasta com exemplos de modelos é C:\RoboDK\Addins\com.robodk.app.shape\Components\models\tbot\.
Dica: Use a caixa de seleção Auto para definir parâmetros com base nas medições da caixa delimitadora do modelo. Pequenos detalhes do modelo podem afetar o resultado da medição. Você pode desmarcar a opção Auto após a medição e definir os parâmetros manualmente.
Dica: Use a caixa de seleção Pernas para adicionar o número necessário de colunas de base com a altura especificada.
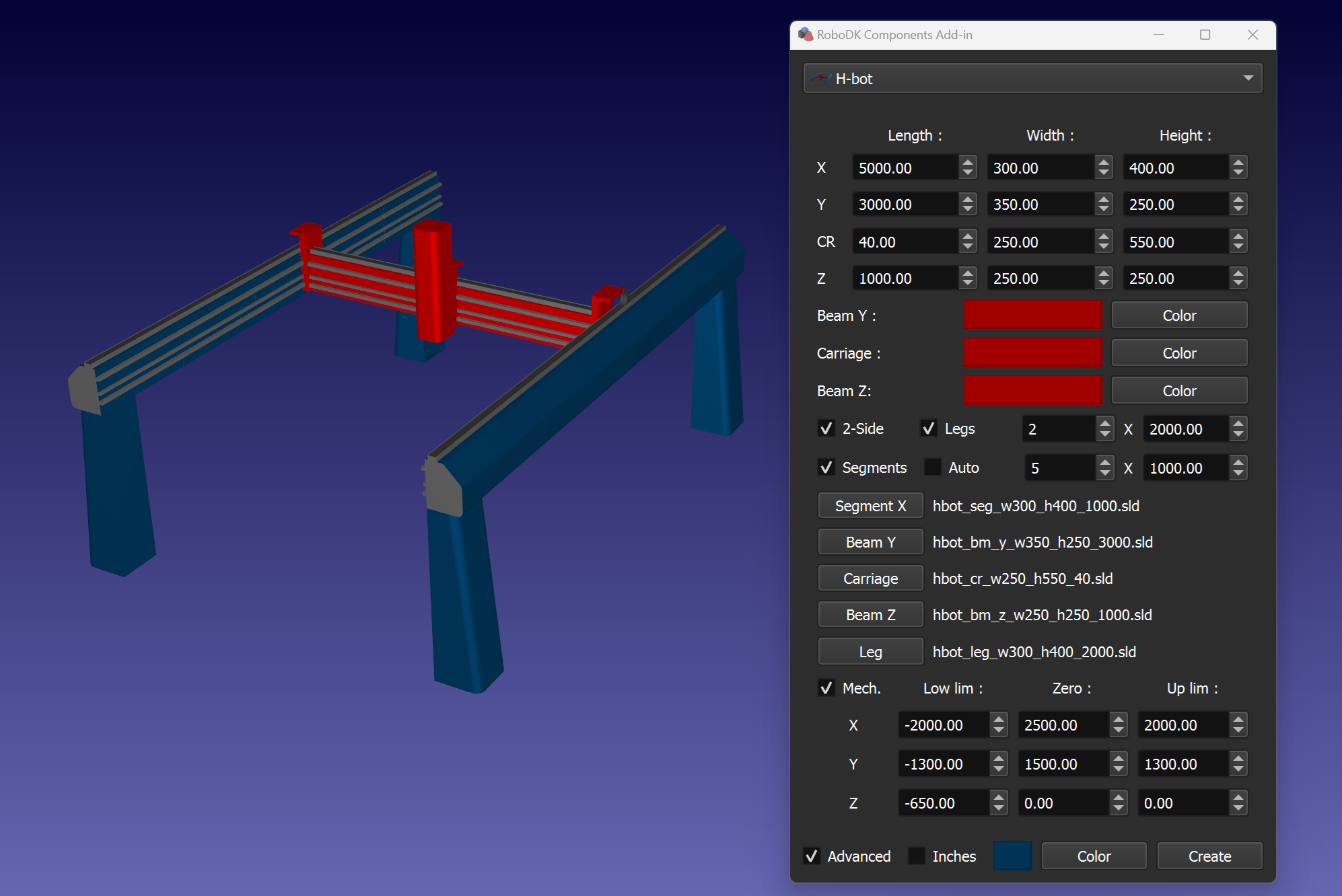
Robô H
Você pode criar um robô H paramétrico definindo parâmetros para a coluna X, a coluna Y, o carro e a coluna Z.
Dica: Você pode criar um Robô H com uma coluna X segmentada usando os modelos Segmento, Coluna Y, Coluna Z e Carro. É necessário definir os arquivos de modelo apropriados usando os botões Segmento X, Coluna Y, Carro e Coluna Z. Certifique-se de usar os valores corretos de dimensão e o número correto de segmentos. Use a caixa de seleção Segmentos para criar o modelo Robô H apropriado.
Dica: Use a caixa de seleção Mecanismo para criar um mecanismo Robô H. Além disso, você pode definir os limites de movimento e a posição zero dos eixos com os parâmetros correspondentes.
Observação: Verifique o deslocamento dos modelos de segmentos, coluna e carro caso a opção Segmentos seja usada. Há vários exemplos na pasta Models. Por padrão, a pasta com exemplos de modelos é C:\RoboDK\Addins\com.robodk.app.shape\Components\models\hbot\.
Dica: Use a caixa de seleção Auto para definir parâmetros com base nas medições da caixa delimitadora do modelo. Pequenos detalhes do modelo podem afetar o resultado da medição. Você pode desmarcar a opção Auto após a medição e definir os parâmetros manualmente.
Dica: Use a caixa de seleção Pernas para adicionar o número necessário de colunas de base com a altura especificada.
Dica: use a caixa de seleção Lado-2 para adicionar uma coluna X espelhada.
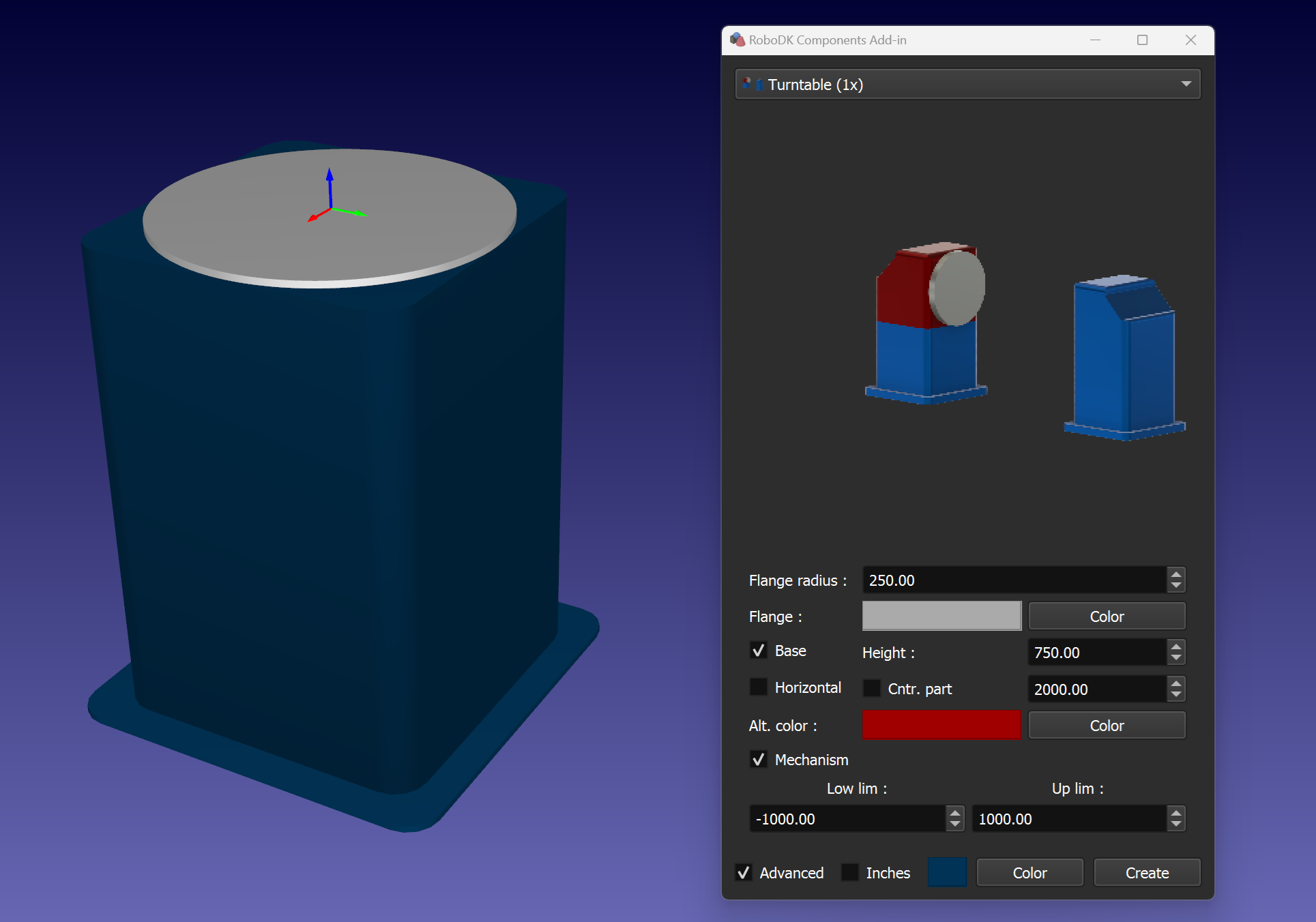
Mesa giratória (1x)
Você pode criar uma Mesa giratória especificando parâmetros como o raio do flange, a altura da base e as cores da base e da flange.
Dica: use a caixa de seleção Base e o parâmetro altura para criar o corpo do posicionador.
Dica: você pode criar um posicionador horizontal ou vertical marcando a caixa de seleção Horizontal. Além disso, você pode usar a caixa de seleção Cntr. peça e o parâmetro de deslocamento correspondente se for necessária uma contra peça.
Dica: use a caixa de seleção Mecanismo para criar um mecanismo de Mesa giratória. Além disso, você pode definir os limites de movimento com os parâmetros correspondentes.
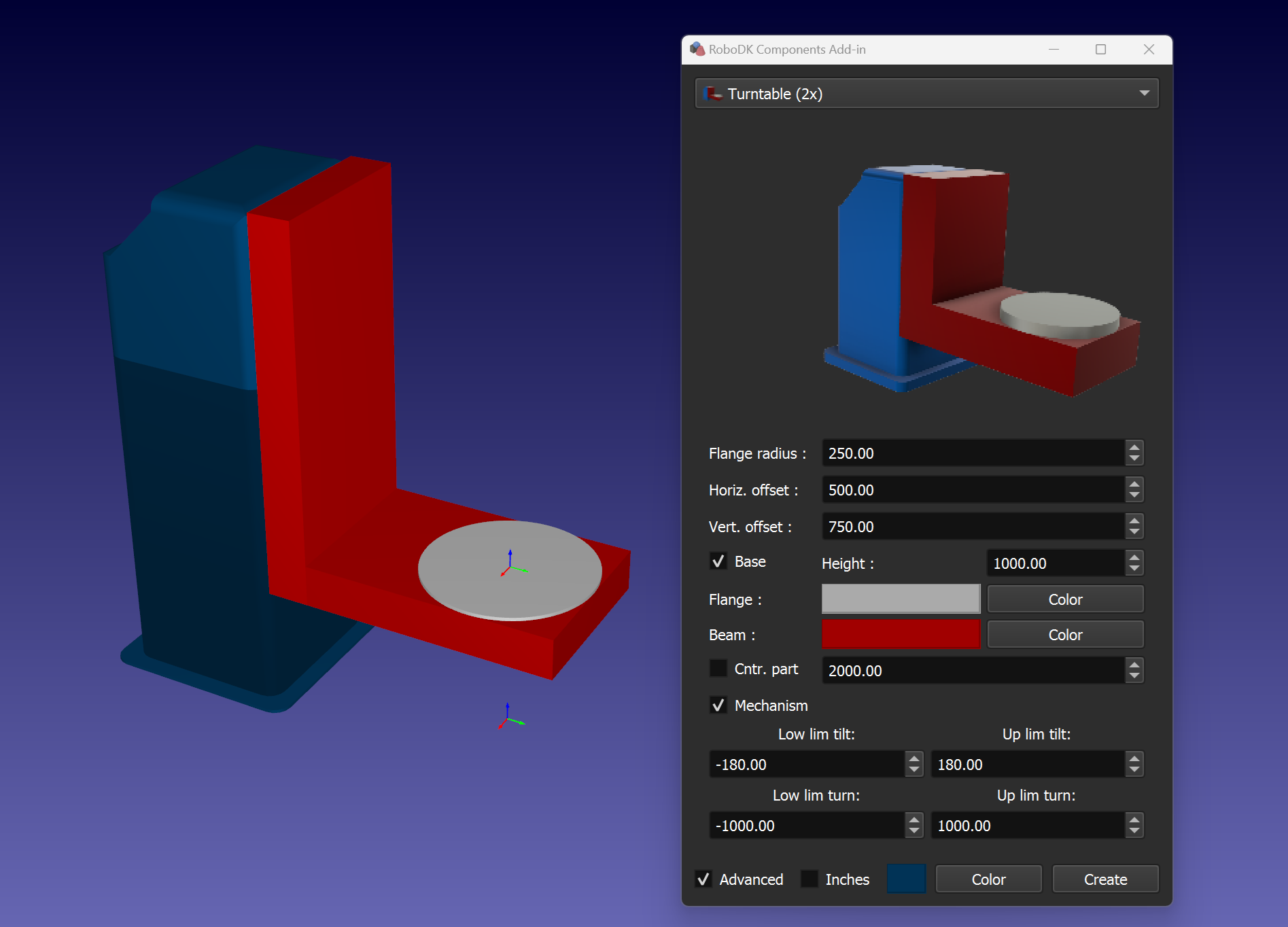
Mesa giratória (2x)
Você pode criar uma Mesa giratória inclinada especificando parâmetros como raio do flange, deslocamentos verticais e horizontais, altura da base e cores para a base, a coluna e o flange.
Dica: use a caixa de seleção Base e o parâmetro altura para criar a base do posicionador.
Dica: você pode usar a caixa de seleção Cntr. peça e o parâmetro de offset correspondente se for necessária uma contra peça.
Dica: use a caixa de seleção Mecanismo para criar um mecanismo de mesa giratória de inclinação. Além disso, você pode definir os limites de movimento com os parâmetros correspondentes.
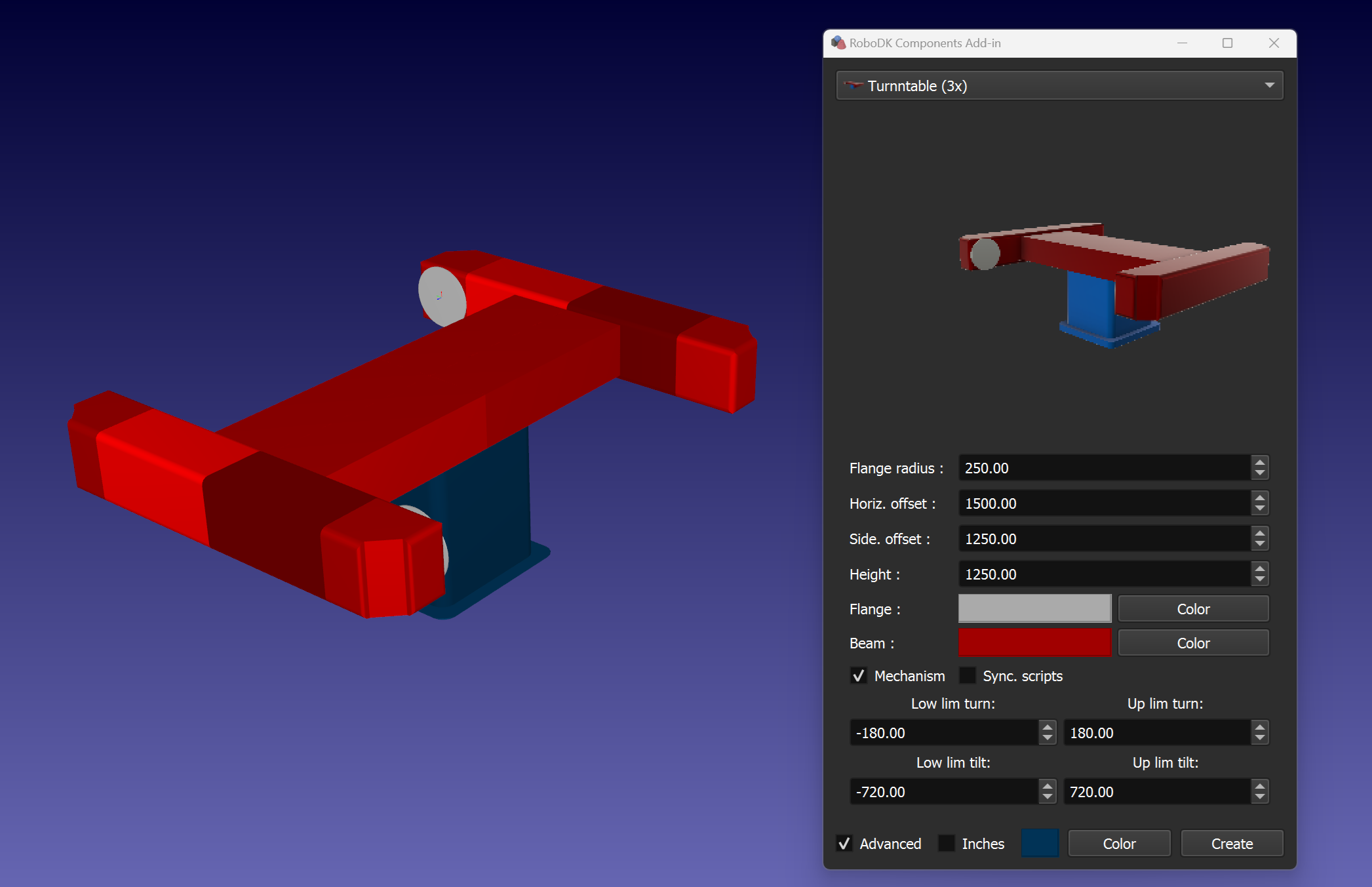
Mesa giratória (3x)
Você pode criar um posicionador de 3 eixos especificando parâmetros como raio do flange, deslocamentos laterais e horizontais, altura e cores para a base, a coluna e os flanges.
Dica: Use a caixa de seleção Mecanismo para criar um mecanismo posicionador de 3 eixos. Além disso, você pode definir os limites de movimento com os parâmetros correspondentes.
Dica: Use a caixa de seleção Sinc. scripts para criar scripts Python adicionais que sincronizarão o robô com o eixo horizontal necessário executando o script correspondente.
Observação: por padrão, C:\RoboDK\Addins\com.robodk.app.shape\Components\scripts\ é a pasta que contém os exemplos de scripts de sincronização.
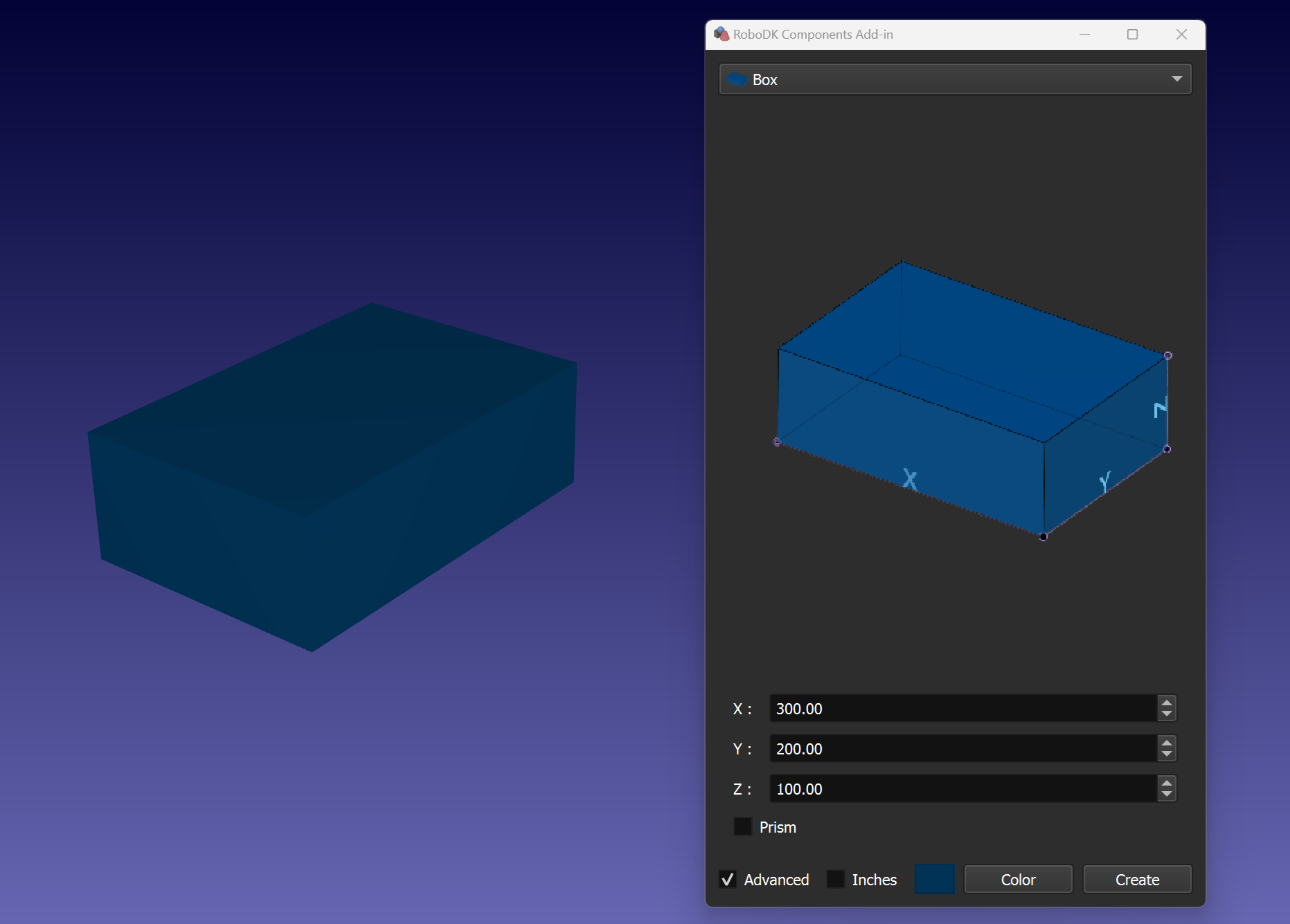
Caixa
Você pode criar uma caixa especificando as dimensões (X, Y, Z).
Dica: use a caixa de seleção Prisma para criar um prisma.
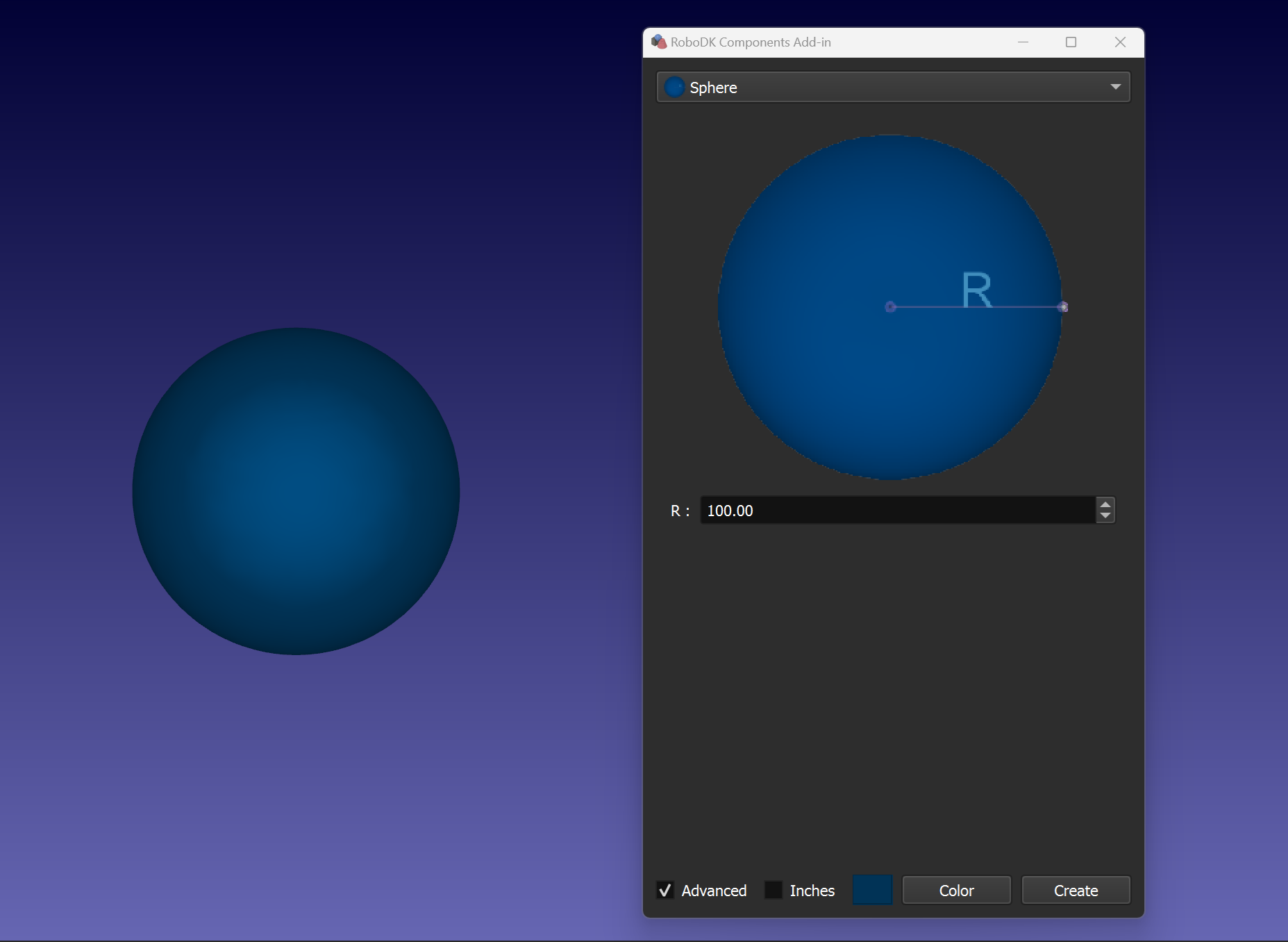
Esfera
Você pode criar uma esfera especificando o raio (R).
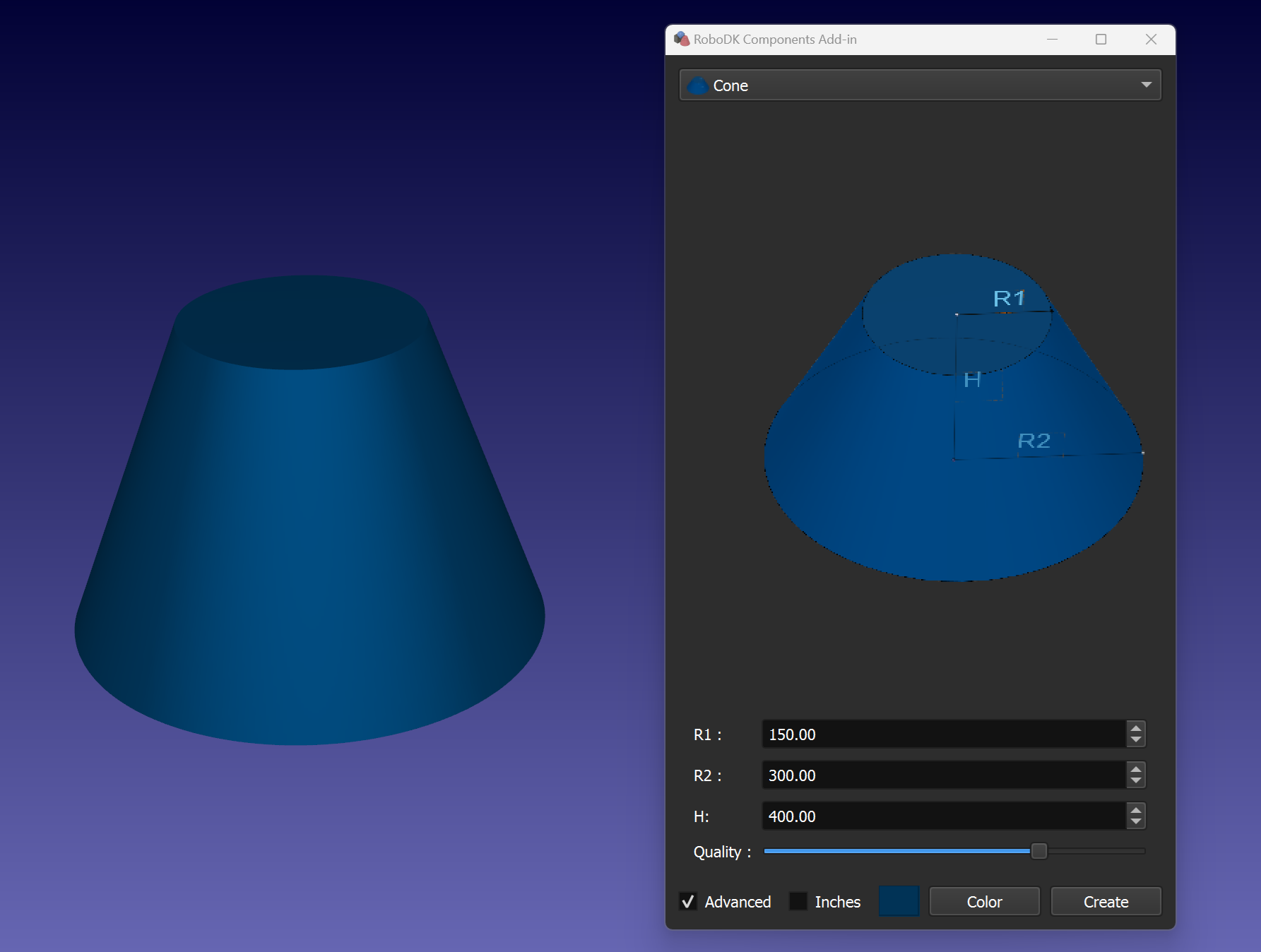
Cone
Você pode criar um cone especificando as dimensões (R1, R2, H) e os parâmetros de qualidade.
Dica: Se R1 for igual a R2, será criado um cilindro.